在复杂场景中,因会使用到大量相同的几何体(比如路灯)而导致几何体的数量迅速增加,进而大大增加了存储量,而运用实例可解决这个问题。实例就像一个模型的影子,而实际物体只有一个(相同的几何体共享同一个模型数据),除了空间位置的不同之外,其他的属性均相同。在使用过程中,只需要通过运用实例的方法来引用该模型即可,即通过坐标矩阵的变化放置同一个模型在不同的位置。在此情况下,只需要占用 1 个几何体数据的存储空间。
对于经上述技术建立起的三维模型,经过测试,在配置有Intel Core II 6600 CPU、2G 内存、Radeon X1300 512M 显存)图形显示卡的普通计算机上可达到每秒 25 帧的实际运行速率,可完全满足普通计算机机上实时场景漫游的需求。
3.2 实时驱动系统的设计
场景模型建成后,可通过 Converse3D 引擎进行实时驱动的应用开发。基于多种技术,Converse3D 引擎可支持较大的场景,具有独特的大场景管理模块,可以实现模型的按需下载和动态加载,且用户操作无停顿感。此外,该引擎还具有动态场景管理功能,可清空视野之外物体的内存显存资源。经过测试,运用该引擎后,具有 1.0×107个三角面和 1 GB 贴图文件数据量的场景在中等配置的计算机中的运行非常流畅。
对于 Converse3D 引擎而言,除了能对超大场景进行视见体裁切外,还可以动态加载进入视野的物体、卸载离开视野的物体的内存显存资源,保持内存、显存占用量处于较低的水平,从而降低超大场景的展示对电脑配置的要求。Converse3D 引擎采用强大的压缩算法来减少模型和贴图的数据量,压缩比例比市面上流行的压缩工具更大。经过测试,具有 1.0×107个三角面和 1 GB 贴图文件数据量的场景经过压缩后其文件仅为 100MB.这一特点在数据文件的网络传输中起到了关键作用。Converse3D 引擎提供的 SDK 可广泛应用于各类开发环境,可支持市面上流行的各类开发语言,比如 VC++、Delphi、VB、JavaScript、Java、JSP、PHP 等。此外,Converse3D 引擎生成的 LOD 地形可根据三角面与相机的距离自动确定三角面的显示级别(密度),与相机距离较近的三角面的密度较大,距离较远的密度较小,从而节省了资源,且不影响渲染效果。LOD 地形可广泛应用于对大规模地形地貌的模拟。
本系统设计了多种漫游方式,主要包括行走、鸟瞰、固定路径等,各种方式的属性定义和相互切换通过编程实现。下列代码片断为鸟瞰的观察方式,主要通过键盘的上、下、左、右键实时控制观察视觉和方向,从而实现在一定的高度上环绕观看整个小区的目标。
为了增强虚拟场景漫游的真实感和逼真度,在系统设计的过程中使用了被动式立体显示技术,可实现小区三维场景的立体显示效果。
3.3 三维模块与管理系统的交互
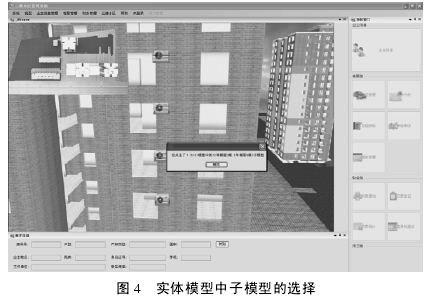
在实体模型中,需要显示某一子模型的信息,如图 4 所示,在点击某一房间后,可根据房间的坐标值判断其所属的楼栋和层数,并抛出接口信息,以供 MIS 信息管理使用。
交互过程通过定位和保存房间位置两个步骤实现。
3.3.1 定位房间位置(相机移动到指定位置)
当用户点击房间列表查看房间信息(BaseInfo)时,三维模块将(3DSence)自动定位房间位置,如图 5 所示。
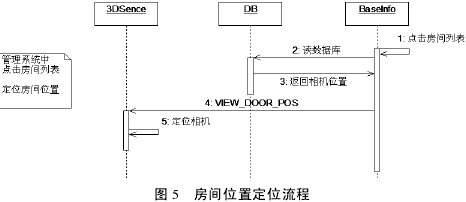
房间位置的定位分为以下 4 步:①系统读取数据库(DB);②数据库返回相机信息(CameraParams),内含相机三维坐标(posX、posY、posZ)和三维方向(dirX、dirY、dirZ);③系统将该相机信息(CameraParms)装箱在VIEW_DOOR_POS消息中发送至三维模块(3DSence);④三维模块(3DSence)拆箱并定位相机。





