自动驾驶论文范文第四篇:探讨5G技术支持下的车路系统自动驾驶技术的实际应用
摘要:近年来自动驾驶成为人工智能和机械自动化发展的重要趋势,随着5G信息技术的不断升级和应用,5G车路协同自动驾驶技术必将迎来光明前景。在此背景下,本文首先探究了车路协同系统的基本架构,在分析车路协同系统发展过程及其性能需求的基础上,探讨了5G技术支持下的车路系统自动驾驶技术路线、关键技术和整体结构,最后以干线物流为研究对象,探究了5G车路协同自动驾驶在干线物流中的实际应用,旨在为5G不断提升车路协同自动驾驶技术的应用水平带来更多参考和启迪。
关键词:车路协同系统;自动驾驶; 5G技术,
随着计算机信息技术的不断成熟和普及,以及我国第五代移动通信网络系统的不断完善,各类依赖5G信息技术的产业应运而生,物联网、车联网等新兴行业不断发展。5G信息技术与人工智能的结合,为车联网领域车路协同自动驾驶技术的快速进步提供了良好发展机遇。另一方面,纵观我国近年来公路交通安全事故发生概况可知,交通问题造成的伤亡人数、交通拥堵成本等不断增加,不仅在较大程度上使安全事故数量大幅度提升,死亡人数不断增加,且在一定程度上给环境治理、保障能源结构安全以及车辆自动化监管等带来了较大难题。基于5G信息技术的车路协同自动驾驶技术的出现,良好地解决了行车安全和环保智能的综合问题,在此背景下,对基于5G技术的车路协同自动驾驶技术的研究,也就具备重要理论意义和现实价值。

1 车路协同系统架构
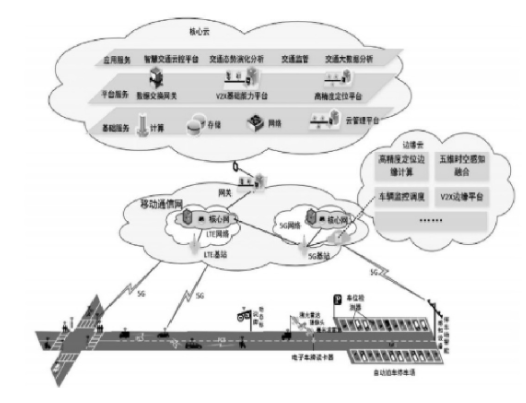
车路协同系统主要采用先进无线网络通信方式和新一代互联网信息技术,全过程、全方位和全要素地实现汽车和道路边建筑的协同发展,高效率实现对车车、车路和人车的动态控制与信息交互,在全过程驾驶行车中达到时空交错下的信息采集和高效融合,开展车路协同安全和道路协同管理,使自动驾驶这一安全目标得以实施,图1即为典型的车路协同架构系统示意图。
图1 典型车路协同系统架构示意图

2 车路协同发展过程及性能需求
2.1 车路协同系统发展
纵观我国车路协同系统发展过程可知,我国车路协同系统主要经历了辅助信息交流沟通、协调感知和协调决策与控制三大阶段,体现了基于5G信息技术的逐步提升车路协同系统的信息交互能力和智能化程度的过程。在路旁相关数据信息的交互使用过程中,可基于信息广播实现车路协同服务以及车路、人车数据信息交换,为车车碰撞、道路施工障碍信息提醒等奠定基础。在人车、车车和车路的协同感知发展阶段,主要基于简单的车路协同网络体系,为驾驶员提供闯红灯提醒、特种车服务优先提醒等信息。基于5G较高带宽和较快速度的信息发展服务,实行高精确度的地图控制和远程监管。总之,基于5G信息技术的协同决策和控制,主要基于人车、车车和车路的协同信息交互与感知,实现智能驾驶及通信,实现高速度数据信息下载甚至广域范围内全方位信息覆盖,为智能行车提供服务。
2.2 典型场景与网络性能指标
车路协同发展系统应用场景主要可概括为以增强用户体验感为核心、以车辆驾驶顺畅度提升为核心和以车路协同系统发展为核心的三大结构,分别分为信息服务类、应用汽车智能类应用和智慧交通类应用三大类别。以车辆驾驶安全为核心的智能汽车感知,在车辆安全运行过程中主要与智能化、信息化和数字化相关,利用车载传感器和周边路旁车辆行驶时建筑环境变化收集数据信息,实现动态识别,便于结合地图上数据信息进行系统优化与分析,保障车辆行驶安全、行驶效率和智能程度。
3 基于5G技术的车路协同自动驾驶技术架构
3.1 5G车路协同自动驾驶技术路线
5G信息技术支撑下的车路协同自动驾驶技术依托数据信息的快速发展,通过车内数据信息、车车数据信息、车路数据信息、人车数据信息和服务设备,实现对汽车行驶数据信息的全方位、全过程和全要素连接,达成数据信息的高效交互与沟通,从而为自动驾驶汽车提供综合服务,形成电子数据信息系统、信息通信和道路交通等诸多行业深度融合的新型产业发展格局,为推动智能交通和促进自动驾驶信息技术的快速提升奠定坚实基础。5G车路协同自动驾驶技术,依托第五代信息网络通信系统,实现高精确度的定位技术、五维时空融合技术、边缘云协同技术和边缘云平台计算等功能,构建边缘云端等分层网络架构体系,建立智能化程度较高的可靠车联网通信,实现车辆数据的实时更新和高精确度定位,为车联网信息的安全和高效率服务,图2即为5G车路协同自动驾驶技术路线。
图2 5G车路协同自动驾驶技术路线
3.2 5G车路协同自动驾驶的关键技术
基于5G信息技术的车路协同,主要依赖于高精确度的定位技术、五维时空信息融合技术、5G边缘计算技术和5G网络边云协同的整体方案,实现人车信息的高效交互和和保障自动驾驶的安全性,在五维时空信息融合技术应用过程中,主要利用道路数据信息、车载传感器、激光扫描仪、毫米波雷达和摄像头等诸多设备获取自动驾驶汽车周边范围内所有交通网络系统参与者的全面的数据信息,结合5G网络通信地图,确保较高速度和较高下载量,利用北斗卫星系统的准确定位、多传感器高精确度同步和数据信息的高效交互与融合感知功能,满足自动驾驶业务需求而提供建模可能。
3.3 5G车路协同自动驾驶整体架构
基于5G信息技术的车路协同自动驾驶,包括车路协同自动驾驶前端设备、通信网络设备、边缘云设备等诸多核心体系,图3即为某公司提出的基于5G网络信息技术的车路协同自动驾驶总体架构示意图。车路协同与自动化驾驶前端设备在应用中主要依赖于智能汽车和路边智能设备连接,利用智能汽车的感知能力、决策能力、控制能力和数据信息的交互能力,通过传感器集成技术对周边环境进行感知,将有用信息用于汽车自动行驶,并将感知到的数据信息传递给边缘层,智能驾驶车辆则在接受边缘层传下数据信息后辅助决策,为汽车智能运行提供可能。
图3 基于5G网络信息技术的车路协同自动驾驶总体架构示意图

4 5G车路协同自动驾驶的实际应用---以干线物流为例
4.1 5G车路协同匝道汇入场景应用
以干线物流为例,5G车路协同汇入匝道场景如图4所示,由图可知,路旁两侧感知设备在匝道汇入口附近收集汇入车辆数据信息,并将主路驶入匝道的车辆数据信息一一通报,使来车位置、来车速度和具体情形得到明确感知,而主路上的车辆在接收上述数据信息后能够调整相应车次信息,保证安全通过。在此过程中,道路两旁的摄像头、雷达、传感器等感知设备监测到车辆距离、类型甚至移动速度等相关信息后,传递计算出移动车辆精确的位置信息和速度信息,将其发送给匝道附近主路的自动驾驶车辆,使车辆能够通过接收设备接收到数据信息而借助卫星定位系统计算与该车辆之间的相对位置、相对速度等参数,调整自身行驶速度以避免碰撞。
图4 5G车路协同汇入匝道场景
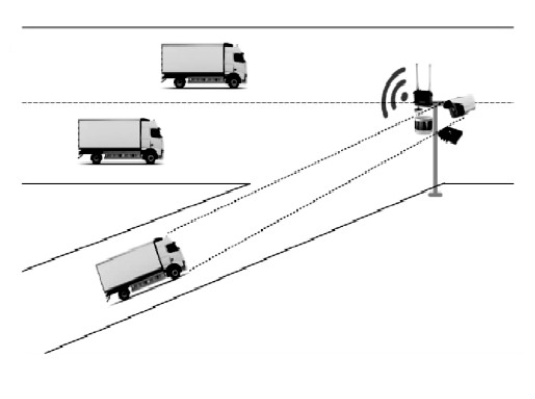
图5 5G超视距场景应用

4.2 5G车路协同坡道信息提示场景应用
利用5G信息系统的车路协同,在坡道信息提示和场景应用过程中,道路两旁架设的感知设备在坡道前方,能够根据坡道原始建设信息发送坡道弯度、坡道长度以及具体坡道位置等参数,自动驾驶车辆在接受上述信息后,通过规划自动驾驶车辆行车动力达到速度分配,实现高效安全地通过坡道的目标。
4.3 5G超视距场景应用
5 G车路协同自动驾驶系统在干线物流中超视距场景的应用如图5所示,由图可知,路旁两侧感知设备等距离分布于道路两旁,各设备负责检测对应负责路段上的交通事故、交通障碍甚至交通抛洒物等参数,并将上述事件通过广播向附近自动驾驶车辆进行传输,通过网络上传到平台系统,利用平台系统的信息集成向其他路边设备同步,利用路边设备将交通事件对外广播,使即将进入该事件发生区域内的自动驾驶车辆能够接受到相关数据后提前对路段进行规划,不断提升行车安全性和通行效率。
结束语
总之,自动驾驶技术是集传感器技术、信息技术、通信技术、计算机技术、人工智能技术和自动化技术等诸多前沿技术于一体的综合性、系统性技术之一,其出现将改变人们对传统模式下人工驾驶交通系统的认知,推动自动驾驶交通产业的进一步发展。本文在总结车路协同自动驾驶关键技术及其应用场景的基础上,以干线物流为例探究了5G车路协同自动驾驶系统的实践应用,旨在为提升5G车路协同自动驾驶系统的应用水平带来一定参考。
参考文献
[1]潘越,周新庄,欧力, 等。简析车路协同自动驾驶系统的关键技术[J]科学技术与创新, 2020(19):50-55.
[2]陈杰,陈建峰。-种基于5G的车路协同自动驾驶技术架构[J].信息通信, 2019(12):39-40.





