自动驾驶论文范文第三篇:一款基于嵌入式的自动驾驶控制系统的设计
摘要:以农用耕地机为研究对象,设计一款基于嵌入式的自动驾驶控制系统。其控制原理是利用预瞄跟随算法对耕地机进行横向控制,使其根据方向盘的转角调整耕地机转弯半径;利用PID算法对耕地机进行纵向控制,使其根据油门脚踏的开合度、制动脚踏的开合度及挡位状态调整耕地机的行驶速度,从而使耕地机按最佳的运行轨迹行驶。系统以单片机最小系统为处理核心,利用周围的传感器设备和GPS接收设备等将耕地机的位置、速度信息通过解码器和串口通信的方式发送给单片机,进行逻辑运算后通过CAN接口将结果发送给方向盘、油门、制动及挡位驱动电机,从而控制耕地机的运行。仿真实验表明:系统能够减小耕地机行驶过程中的横向误差,可根据土地实况自动调整行驶速度,实现了耕地机的自动驾驶。
关键词:耕地机;自动驾驶;嵌入式;预瞄跟踪; PID;
作者简介:彭开勤(1971-),男,武汉人,副教授,硕士,(E-mail)boujekn8@163.com.;
基金:国家一般课题(BJA070037);湖北省教育科学"十二五"规划课题(2014B422);湖北省教育厅自然科学类重点科研项目(D20106302);

Abstract:This article takes agricultural cultivator as the research object, and designs an embedded automatic driving control system. The control principle is to use the preview and follow algorithm to control the cultivator horizontally, so that it can adjust the turning radius of the cultivator according to the steering wheel angle; use the PID algorithm to control the cultivator longitudinally, so that it can be braked according to the opening and closing degree of the accelerator pedal The opening and closing degree of the pedals and the gear status adjust the driving speed of the cultivator, so that the cultivator can drive according to the best running track. The hardware structure of the system is mainly based on the smallest single-chip microcomputer system as the processing core. It uses the surrounding sensor equipment and GPS receiving equipment to send the position and speed information of the cultivator to the single-chip microcomputer through the decoder and serial communication. After logical operation, The CAN interface sends the results to the steering wheel, throttle, brake and gear drive motors to control the operation of the cultivator. Finally, software simulation experiments verify that the system can reduce the lateral error of the cultivator during the driving process, and can automatically adjust the driving speed according to the actual situation of the land to realize the automatic driving of the cultivator.
Keyword:cultivator; automatic driving; embedded; preview tracking; PID;
0 引言
随着微电子行业、通信行业的高速发展,现代农业从耕地、播种、施肥、灌溉到收割都在逐步向集成化、精细化和智能化方向发展,尤其是耕地作业。传统的耕地机以人工驾驶为主,作业人员容易吸入飞扬的尘埃,对人体伤害极大[1];除此之外,还存在作业效率低、耕地行距不一致、耕地方向不易控制等缺点。因此,如何利用高新集成技术实现耕地机的自动驾驶作业,减轻作业人员的工作任务,最大限度地提高工作效率,已经成为耕地作业发展的必然趋势[2].
借助专用性强、实时性高、体系结构灵活的嵌入式技术,笔者设计了一款耕地机自动驾驶系统。系统通过对收集到的耕地机位置、当前速度及土地实况等信息进行处理[3],以此来控制耕地机在行驶过程中的方向和速度,减小行驶过程中的横向误差,提高作业效率,使其保持期望的耕地轨迹,为今后实现精细耕作提供了理论基础[4].
1 自动驾驶控制原理
耕地机的自动驾驶系统的实现主要分为感知单元、控制单元和执行单元3大部分,其结构框架如图1所示。
图1 耕地机自动驾驶系统组成
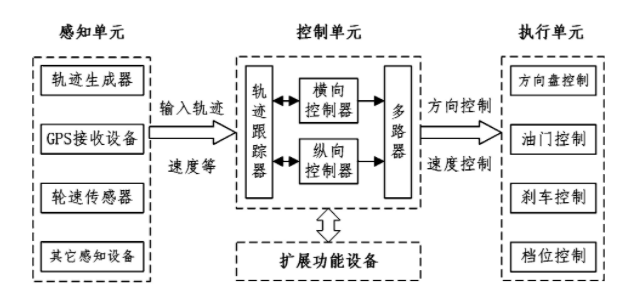
Fig.1 The composition of the automatic driving system of the cultivator
通过感知单元的轨迹生成器、GPS接收器、各种传感器等收集和读取土地及耕地机的相关信息,发送给控制单元,控制单元通过逻辑运算后生成控制命令;执行单元接收到命令后,驱动方向盘、油门踏板、制动踏板及挡位进行动作[5],从而控制耕地机的行驶方向和速度,即所谓的横向控制和纵向控制。
横向控制的实现主要依据预瞄跟踪算法[6].预瞄跟踪算法原理是在耕地机行驶过程中选取适当的目标点(又称点预瞄点),计算当前位置与预瞄点之间的曲线曲率,该曲率即为耕地机的转弯半径;然后,依照转弯半径和方向盘转角之间的比例关系,决定耕地机方向盘的转动角度;如果该角度不在期望的范围内,则放弃该预瞄点,继续寻找轨迹上其他的点,直到找到合适的位置[7].通过此方式可以逐一盘查行程轨迹,输出相应的控制命令,以此完成自动驾驶过程中的横向控制[8].在此过程中,选取合适的预瞄点是决定耕地机行驶方向的关键[9].预瞄跟踪算法如图2所示。
图2 预瞄跟踪算法

Fig.2 Preview tracking algorithm
图2中,预定行驶轨迹为L,耕地机当前位置为A,耕地机当前偏向角为α,散点为预瞄点,以B为选定预瞄点[10],则耕地机的转弯半径为R,下次的偏向角则为β。其中,预瞄点B必须在A的前方,并与A的距离必须在计划的范围内,否则抛弃该点,重新进行选择[11].
纵向控制的实现方法有PID控制、神经网络控制及滑模控制等。其中,PID算法由于简单可靠被广泛应用。PID算法主要是依据耕地机轨迹生成器、GPS接收器及感知器等输入信息[12],计算其比例、积分和微分的偏差,以此决定需要加速或减速[13],从而控制控制耕地机油门踏板开合度、制动踏板开合度及挡位的加减,从而控制耕地机的纵向行驶速度[14].
2 硬件设计
设计的耕地机自动驾驶系统主要包括数据解码器、串口通信单元、数据记录模块、单片机最小系统及CAN接口等部分,硬件结构如图3所示。
图3 硬件组成结构
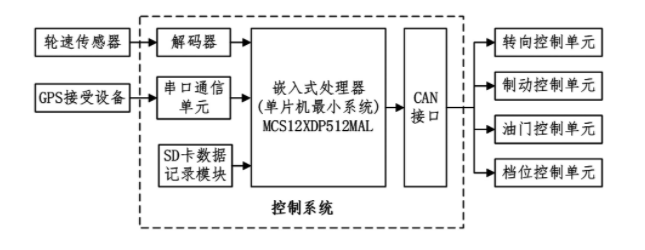
Fig.3 Hardware structure
单片机最小系统是嵌入式核心处理器,包括单片机、时钟电路、脉冲电路、复位电路、按键电路及下载电路等基础器件电路,主要依据预瞄跟踪算法和PID算法,对输入的轨迹信息、GPS信息等进行运算处理。在此,单片机选用飞思卡尔的MCS12XDP512MAL,为双核16位处理器,体积小、速度快,具有串口、CAN及SPI等通信接口,可满足系统需求。解码器主要对车轮传感器的数据进行解码,获取耕地机速度信息,并发送给单片机系统。串口通信单元主要与GPS进行通信,获取耕地机目前所处位置的信息。SD卡数据记录模块主要是存储耕地机行驶位置、速度等信息,为耕地机行驶轨迹提供数据。CAN接口主要将单片机处理后的信息发送给耕地机电机控制器,以此控制转向、制动、油门和挡位驱动电机。
3 软件实现
结合上述硬件电路,整个系统的具体实现流程如图4所示。
图4 软件实现流程

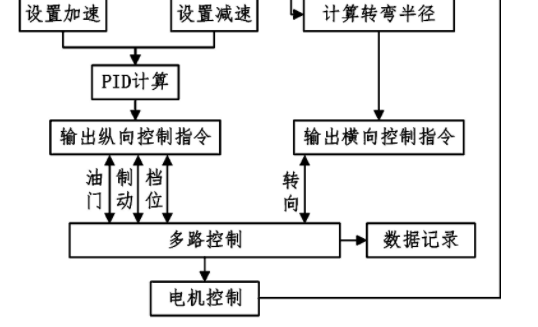
Fig.4 Software implementation process
自动驾驶系统软件需要实现的功能有:①通过按键判断耕地机驾驶模式为人工还是自动驾驶;②在自动驾驶模式下接收GPS发送的耕地机位置信息、速度等信息;③接收来自上位机解析的耕地机轨迹散点,并发送给轨迹生成器,生成预定轨迹;④寻找合适的预瞄点;⑤根据预瞄跟踪和PID模型对预瞄点进行横向和纵向的参数计算,并生成控制指令;⑥将控制指令通过多路控制器发送给电机,驱动方向盘转角电机、油门脚踏电机、制动脚踏电机及档位控制电机进行动作;⑦实时将耕地机的速度、位置等信息存储于SD卡。软件实现以Code Warrior For Freescale为开发平台,借助μC/OS-Ⅱ嵌入式操作系统,对自动驾驶系统代码进行移植和应用,以此提高该系统的实时性和稳定性[15].
4 仿真实验
为了验证设计的自动驾驶技术的可行性,仿真实验以国内耕地机自身相关的技术指标为依据,具体如表1所示。
表1 耕地机自身指标

依据上述指标,以耕地机最常见的直角弯道为期望轨迹,耕地机的期望速度取为10m/s, 将行驶状态的期望值与预瞄跟随测试值同预瞄跟随+PID综合测试值进行对比,得到运行轨迹、耕地机速度、方向盘转角、横向误差等仿真结果,如图5所示。
图5 仿真结果
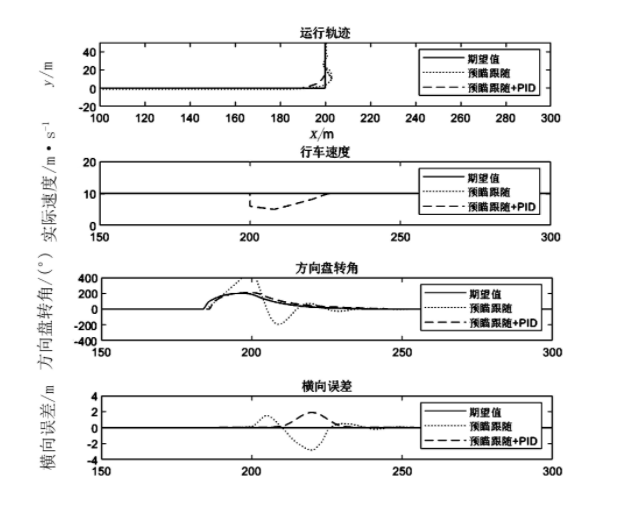
Fig.5 Simulation results
由图5可以看出:根据"预瞄跟随"理论得到的横向误差在0~2.8m之间,耕地机的运行轨迹基本吻合期望的运行轨迹,但方向盘转角误差相对较大,性能不够稳定。在此基础上加入PID控制,测试混合控制的各项值。此时,由横向误差图可以看出:耕地机的横向误差最大为1.9m, 比预瞄跟随单独控制的误差有所降低,说明了混合控制能够更精确的控制耕地机自动驾驶;另外,在200m直角转弯处,根据耕地机的油门踏板开合度、制动踏板开合度及挡位状态控制降低车速,使车速保持在5m/s左右,方向盘的转角基本与期望值重合,使得耕地机运行轨迹能够较好地跟随期望轨迹行驶。
5 结论
借助嵌入式技术对自动驾驶的控制系统进行设计,包括其硬件结构和软件实现。硬件结构主要基于单片机和通信控制理论,软件实现主要依据预瞄跟随算法和PID算法对耕地机的行驶方向和速度进行控制。仿真实验结果表明:该方案能够实现由方向盘转角控制耕地机转弯半径,降低了耕地机在行驶过程中的横向误差;由油门、制动机挡位状态控制耕地机的运行速度,使得耕地机在预期路线中根据现场土地实况实现速度的调节,从而提高了自动驾驶的精确性和稳定性。
参考文献
[1]李顺欣,秀凤,李洋现代农业机械智能化发展趋势分析[J]南方农机, 2020,51(24):6,13.
[2]战雨蒙。农业机械智能化设计技术发展现状与展望[J]方农机, 2020,51(24):7,21-22.
[3]朱浩然农业机械自动化技术要趿优化应用措施[J]南方农机, 2020,51(24):31-32.
[4]张玉兰,王银洲农业机械智能化设计技术发展现状与展望[J].、农业技术与装备, 2020(12): 106-107.
[5]真冈朋光嵌入式人工智能、物联网和自动驾驶的机遇与挑战[J]电子产品世界, 2020,27(1):15.
[6]佚名人工智能对自动驾驶汽车的影响[J].中国集成电路, 2019,28(10):75-81.
[7]勇新型耕地机的设计原理[J].农业开发与装备, 2019(7):90-91.
[8]梁硕基于嵌入式和机器学习的农用车辆自动驾驶系统[J].农机化研究, 2020,42(2):256-260.
[9]王治平。自动驾驶汽车及技术发展研究[J].科技经济导刊, 2019,27(5):99.
[10]杨俊刚,卢佳祈,董启甲, 等。一种集中式智能农机自动导航驾驶控制器的设计与实现[J].计算机测量与控制, 2019,27(1):126-130.
[11]章枧,徐军,杜宇,等基于模型的自动驾驶仪软件开发[J]导航定位与授时, 2017,4(1):49-52.
[12]薛龙,马蓉拖拉机自动驾驶监控系统软件设计[J].农机化研究, 2015,37(7):89-92.
[13]徐照胜,王葵,李碧春,等轨迹跟踪控制算法在汽车自动驾驶中的应用[J]仪表技术, 2012(9):21-23,48.
[14]张鹏利。自动驾驶仪软件开发与管理[J]航空计算技术, 2011,41(5):85-87.
[15]张自友。智能行驶汽车模型研究[J].乐山师范学院学报, 2006(12)-:36-38.





