����ժ Ҫ
����AGV (Automatic Guided Vehicle)����������Ϊ���ƺ��ġ�����Ϊ������װ�з� �Ӵ�����װ�õ����˼�ʻ�Զ��������س�,���Զ���ҵ�Ļ��������ǵ�����ʻ����ַͣ ���ƽ��غ�.��Ϊ�������������Զ�������Ч�ֶκ���������ϵͳ�Ĺؼ��豸,AGV �Ѿ��õ���Խ��Խ�㷺��Ӧ��,�� AGV ���о�Ҳ����ʮ����Ҫ�������������ʵ����.
��������Ŀ���о�Ŀ������Ӧ���������ʱ������,���ݿͻ�ʵ���������Ƴ���ʵ�� �IJ�Ʒ,ʹ��е�Զ���������һ���߶�,�����������Ĺ�����ʽ.���������ɱ�,�� ����ҵЧ��.��Ҫ�����ɹ���:
����1. ͨ���Ի���Ӳ������������ƺͲ��ϸ���,ʹ�����ں�Ϊһ������.���������� ��ܡ�����װ�á�Һѹ��Ԫ������������ּ���������������Ӧ�ĵ���.
����2. ��������ǶԸ���ģ������ݲɼ��´�ָ�����������Զ����е�����.Ӳ���� �������һ��,�ﵽ�Զ�����,�Զ���ʻ��Ŀ��.���ٿ��߸���ϸ����ȫ��IJο����� �Ա�������Ż���������.
����3. �������ԭ�� AGV �Ļ�����,������һЩ����,���Ȳ��� Petri ��ϵͳ�� AGV ����ϵͳ�����Ż�����,Ȼ��������������ƽ̨�Ŀ���,�Ա��� AGV ֮����ײ.
����4. ���ڸ��� AGV �����,�������˶�����˵�Դϵͳ�Ŀ���,�Ӷ���� AGV �� ��������Ч��.
����5. ���,�������˻��ڸ��ɴ��е�����Һѹת��ϵͳ�����ܹ�ҵ����ת��Ť���� ��ʽ����ת��ϵͳ������Ӧ����������ϵͳ��,ʹ AGV С��������Ч�ʵõ��������.
�������Ļ���Ͼ�����������һ�ſ� AGV �Զ�������Ŀ��һӦ�ð����� AGV ��Ӧ�� �������˱Ƚ���ϸ�������IJ���,���������µ���ȷ���豸���ϵͳ����Ӧ�õ�һ�� �����Ĺ���.
�����ؼ���:�Զ�λ����,Petri ��,��AGV��Դϵͳ
����ABSTRACT
����The AGV (Automatic Guided Vehicle) is an unmanned automatic guided vehicle equipped with a microcontroller as the control core,battery-powered,and equipped with a non-contact guiding device.The basic function of the automatic operation is to guide the driving and to locate the target.And hand over the load.As an effective means of modern logistics processing automation and a key equipment for flexible manufacturing systems, AGV has been widely used,and the research on AGV is also of great theoretical and practical significance.
����The research purpose of the project is to adapt to the ever-changing background of the times , to design more practical products according to the customer's field situation , to promote the automation of machinery to a higher level , and to bring a simpler way of working.Reduce labor costs and improve business efficiency.The mainly effort:
����1. Through the design and continuous updating of the machine hardware and software, the two are integrated into one.The shape frame,drive unit,hydraulic unit,power output part and sensor of the machine have been adjusted accordingly.
����2. The software design is to perform the task of automatically running the machine for the data acquisition of each module.The hardware and software are consistent,achieving the purpose of automatic handling and automatic driving.Give the controller more detailed and comprehensive reference data to analyze and optimize the workflow.
����3. In addition , the design has made some innovations on the basis of the original AGV.Firstly,the Petri net system is used to optimize the scheduling of the AGV logistics system , and then the software and simulation platform are developed to avoid collision between AGVs.
����4. Based on the AGV.The design also carried out the development of a multi-robot power system to improve the overall operational efficiency of the AGV.
����5. Finally , a new hydraulic steering system based on load sensing , an intelligent industrial vehicle steering torque adjustable electronic steering system , and an adaptive proportional lifting system have been developed to significantly improve the operational efficiency of the AGV trolley.
����This paper also combines the application case of AGV automatic handling project of Jingdong Logistics Asia No.1 library to make a detailed and complete description of the application of AGV , including a complete process of order placement , equipment specification and system software application.
����Key words: Self-positioning navigation, Petri net, Multi-AGV power system
����Ŀ¼
����ժҪ···············································I
����ABSTRACT···············································��
����Ŀ¼···············································��
������1������···············································1
����1.1�����о�����������···············································1
����1.2�����о��Ĺ�������״···············································2
����1.2.1AGV�ķ�չ��ʷ···············································2
����1.2.2AGV�Ĺ����ⷢչ��״···············································3
����1.3�����о�����···············································5
����1.4�����о��ļ���·��···············································6
������2�´�ͳ�������˻�е��AGV����···············································7
����2.1��ͳ�������˻�е···············································7
����2.1.1����泵��״···············································7
����2.1.2���ڲ泵��չ����···············································7
����2.2AGV�Ķ���···············································8
����2.3AGV�ķ���···············································8
����2.4AGV��Ӧ������···············································9
����2.5����С��···············································10
������3��HC���ܰ��˲泵��Ӳ�����···············································11
����3.1ָ��������···············································11
����3.1.1���弼�����···············································11
����3.1.2��Ҫ����ָ��···············································12
����3.2Ӳ���ṹ���···············································13
����3.2.1���κͿ�ܽṹ···············································13
����3.2.2Ӳ�����···············································16
����3.3���ڸ��ɴ��е�����Һѹת��ϵͳ···············································18
����3.4���ܹ�ҵ����ת��Ť���ɵ�ʽ����ת��ϵͳ···············································18
����3.5����Ӧ���������½�ϵͳ···············································19
����3.6������˵�Դϵͳ�Ŀ���···············································19
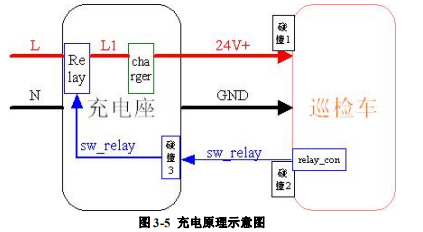
����3.6.1��繦��···············································19
����3.6.2���ʵ�ַ���···············································20
����3.6.3��������···············································21
����3.6.4���ܳ��վ������PLC���Ʒ�ʽ···············································22
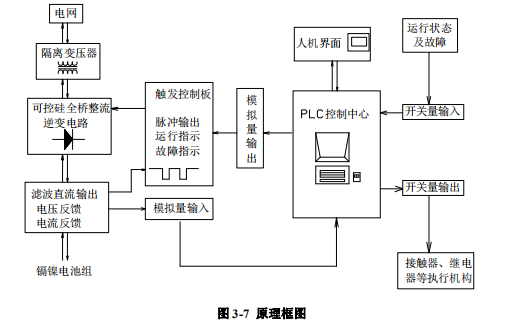
����3.6.5������������ѹ�ɼ�������···············································22
����3.7����С��···············································26
������4�»���PETRI�ĵ����������···············································27
����4.1�����������ϵͳ�Ż������㷨···············································28
����4.1.1�����������ϵͳ���ȵĸ�����������···············································28
����4.1.2�����������ϵͳ���ȳ��ý������···············································29
����4.2����PETRI���Ķ����������ϵͳ��ģ···············································30
����4.2.1PETRI��������������ϵͳ�Ż������е���ϵ···············································30
����4.2.2����PETRI��ϵͳ···············································31
����4.2.3PETRI��ϵͳ�Ż�···············································33
����4.2.4����ײ·����ģ···············································36
����4.3����PETRI������ϵͳ�����е�����···············································38
����4.4����PETRI����������ϵͳ�������···············································39
����4.5��������������ƽ̨�Ŀ���···············································40
����4.5.1���滷���Ĵ···············································41
����4.5.2����������···············································41
����4.6����С��···············································42
������5��AGVӦ���о�···············································43
����5.1������������һ�ſ�AGV�Զ�������Ŀ����···············································43
����5.1.1����һ�ż��···············································43
����5.1.2�����AGV�Ѷ������···············································44
����5.2�����嵥···············································45
����5.3�豸�������···············································45
����5.3.1AGV��������···············································45
����5.3.2AGV����···············································48
����5.3.3AGV����Ӳ������···············································50
����5.3.4ϵͳ����···············································51
����5.4����С��···············································54
������6�½���···············································55
����6.1�ܽ�···············································55
����6.2������չ��···············································55
�����ο�����···············································57
������л···············································60
������1������
����1.1���������������
������"�й�����2025"����,����������ģʽ���ڷ�����ת��.�ն��û������������뵽������������,����ģʽ�ӵ�һƷ�ֹ�ģ������ת��Ϊ"С����,��Ʒ��".ͬʱ�������������ܻ����������Ѿ�����չ��.����Դ�ĵ��ȷ���,ERPϵͳ��APSϵͳ��MESϵͳ��ƽ̨�ں�,�ܹ�ʵ����Դ�����Ե���;����������,ͨ������ר����������ҵ�����˵�Ӧ��,Ҳ��������������е�����.
������Ŀǰ�Ĺ�����Ӫ״������,����������Ȼ�����˹���ҵ��ʽΪ��.���������������в嵥�����ߵȳ��ֵĸ���Խ��Խ��,�Թ�����������Ӧ�ٶ�,����ȷ��Ҫ�����,���˹���ҵ������������,�ڼ�ʱ�Ժ�ȷ�Է������ﵽ������ҵ��Ҫ��.
������һ����,���Ƕ���������ҵ������Ҫ��Խ��Խ��,�ر������ֻ�����������¡��ж����к����۳�����������ը�����ߵ�,��ҵ���Ͷ���������Σ��.ͬʱ,�������ظ��������Ͷ�������Ͷ�����ȱ������,��ЩΣ���ؽ���������.
�����Ի����˴����������ֻ��������Ͷ�ǿ�Ȼ����µ�ֱ���Ͷ�,�����������ij�·.���ܹ�ҵ����������ĿǰΪ��ҵ�Զ�����������Ҫʵ�ַ�ʽ,���㷺Ӧ�����ظ����ˡ����˹���ǿ�ȴ����������ӡ�����Ҫ��ߵ�����.�ڹ����Ӧ�������Ѿ��ȽϹ㷺,�����ִ������졢�������ྻ�����ֵ�,�����鼰���и�ҵ;��Ȼ����ĿǰֻӦ���������Զ����̶Ƚϸߵ���ҵ,�����Ÿ���ҵ�����������������,�г���չ�ռ��.
�������ܹ�ҵ���������˵����ƿ��Խ��һϵ�еĹ�ҵ�����ֻ�������,�����������ϵİ���,ͨ�����ܹ�ҵ���������˵�Ӧ�ÿ��Խ����ҵ������������������,�˹������Ͷ�ǿ�ȸߵ�����.���ڶ������Э���������Ż�ϵͳ,���Խ�����˹����б����ȴ�ʱ�����,����Ч�ʵ��µ�����[1].
�������ܹ�ҵ���������˵�Ӧ��,�����ڽ������ڹ��ڵ����������������,���Ų�Ʒ�ļ���ˮƽ�Ϳɿ��Ե�����,Ҳ���������������չ�ĵ���������ҵ,�������������,����ࡢʱЧ�Ժ�ȷ��Ҫ��ߵ�����.����,Ҳ���������ھ���������ҵ�е�Ӧ��[2].
���������������ͳ��,�ڵ�ǰ�ִ���������ҵ��,���ϴ���ռ���˴�������������,��߿��Դﵽ90%����.���ϴ�������,��ϴ洢����,������ռ�������ӹ��ܷ��õ�40%����.�������ϴ����豸,����Զ���ˮƽ����,�������ھ���Ч�������,ֱ�ӻᵼ�������������̵ijɱ�����.�Դ�,��ҵ�����������������豸���з�������,ͨ�����Ͷ������ɱ��Ŀ���,����߶��豸���ܵ�������Ͷ��,��������Ƚ��豸�������ٶ�������,����������͵���Ӧ����,�ƶ��������Զ���ˮƽ������[3].AGV�ǵ�ǰӦ���������������ܹ�ע��ϵͳ,��Ҫ�ص�����ɱ�̡��Զ��滮����Э����,����һϵ�����������е����ܲ���,�ǵ�ǰ�����豸��ϵͳ����Ҫ����ɲ���֮һ,�����ƶ�����ҵ���ܻ���չ������Ҫ����.����֮��,AGV�����ɫ������,���㷺Ӧ�õ�����ҵ��������ҵ�����յȶ���������,�ܹ�������ҵ��ͳ������״,�������Ч��,������ͳ����,ʵ���¼�������˼ά�ķ�չ.Ҳ�������ڴ���ȫ�µ���ҵ��������,�ƶ���ҵ�ɳ�����������չ[4].
��������Ŀּ���о����ܻ������ؼ�װ��-���ܹ�ҵ���������˼��伯Ⱥ���������Ż�����ϵͳ.�Ծ�������֪ʶ��Ȩ�����ܹ�ҵ����������Ϊ�������Զ�����˵���Э��Ϊ���,���ɶ����������ؼ���,������Ҫ����ҵ���칤�����Զ�������ϵͳ,ϵͳ�ȶ�����Ч�Ҿ������õĿ���չ��,����������������������.��Ŀ��Ҫ��ɵĹ��������������ܹ�ҵ�������켰����.��ͳ�Ĺ�ҵ������������������ʻ��,�����dz��ʺ��Զ�����Ҫ��,��Ҫ������Եĸ���[5].�ر�������Ʒ�ʽ��ת��ʽ��Ҫ���ϴ�ĵ���.����ʵ������ƶ�����,�����ܵ���ϵͳ���������,��ɰ�������.
����1.2����ķ�չ����������״
����1.2.1AGV�ķ�չ��ʷ
����AGV�����ķ�չ��ʷ��������Դ[6]:һ���ɲ泵������չ����,һ���ɻ����˼�����չ����.����������Դ��Ŀ����һ�µ�,����ʵ�ֻ�����Զ�����.�ӵ�����������,�似���ķ�չ�����˵�ŵ�������ѧ���������������·�����Ӿ������ȷ�չ��.�ӿ��Ʒ�������,�������ר�÷�սṹ��չ�����ڵĿ���ʽ�ṹ.�������ķ�ʽ��,��ԭ����ֱ�����������ֱ����ˢ��������������ŷ��������.����Դ�Ƕȿ�,�������Ǧ���ط�չ�����ٳ����������,�ٵ�����Ҫ���ĸ�Ӧ���緽ʽ.
������������������˾��1913��ʹ����AGV,������������������������е����װ��������������,�����Ǹ���Ʒ���������̵İ�װ,���������ŵ�����.����,���ſƼ��IJ��Ͻ���,���˶�ʮ������ʮ���,��������Ƽ���˾��ʼ�з���Ϊ�Ƚ���Ч���Զ�����ϵͳ,��������Basrret��˾,�ͳɹ��з�����һ������ǣ��������,���м����Զ�����ϵͳ[7].AGV��ʼ�õ���Ϊ�Ƚ�������,���ʼ��Ͷ�뵽������������ij���������,�����������õ����ִ洢�Ļ���������,�ü����ڿƼ���չ�в��Ͻ����ͳ���.��ʮ������ʮ���ĩ,����������ٴ��ƶ��Զ����ķ�չ,����ļ��������ϵͳ����,�����ִ���ǣ��ʽAGV����,���㷺Ӧ�õ����������������.
������������ʮ���,ŷ��˾�Ը������������ƶ��˹淶����,�ƶ���AGV�Ľ�һ����չ.�ڶ�ʱ����,�ܿ쳬Խ���������еļ���,����ŷ���ִ����ܹ�ҵ�ķ�չ.��������ʮ�������,�ܵ�ȫ��Χ�ڶ�AGV����������Ӱ��,����ֶ��ֹ�˾��ʼ�����з����Ƚ���AGV����,����Ͷ�뵽��Ϊ�㷺����������[8].����ֶ���AGV���з�����,����Ӧ����������װ����������,ʵ���˵�ʱ���Ч�ʵ�������ҵ.AGVϵͳ���������˵����ҵ�����˾�ľ���Ч��.
���������Ͱ�ʮ���,ŷ��AGV������������ת��.��ʱ,��������˾���ؽ���Ҫ��ŷ�����е�AGV����������,�ھ��Ƚ��ĿƼ��˲�,ȥ�з�����ˮƽ�ļ���.���,���������ϵͳ�ܵ���ע,ϵͳʵ���Զ���繦��,��Ҳ�ǵ�һ��ʵ�������豸24Сʱ�Զ�������,�ﵽ�˸��ߵ�רҵ��ˮƽ[9].���,��ʮ�������,ͨ��������ΪAGV�����û�,������������Ҳ�õ�Ӧ��,���AGVϵͳ,��ʼո¶ͷ��.���еļ��⡢����������,��ϵͳ�õ����ߵ�ȷ��[10].
����80�������,���Ӳ�Ʒ��������ȿƼ���Ʒ�õ����ٷ�չ,������ͿƼ���Ʒ��Ӧ�õ�AGVϵͳ��,�������������AGVϵͳ���ܼ�ģ������.��ʮһ��������,AGV���������ܻ���չ,����������PCϵͳ,��AGV���п��Ƽ�����,��ʵʩ��Ӧ�ļ��,�ɴ�������һϵ���µĿ��Ʒ���.��Щ��,���˹����ܡ������˵�����Ϊ����,��AGVϵͳ��Ӧ���в��ϲ�������,�����������ۼ��Ӿ������ȼ���Ҳ��Ͷ�뵽AGVϵͳ��[11].δ��,AGV����������Ƚ������ܵķ���չ[12].
����1.2.2AGV�Ĺ����ⷢչ��״
AGV���ȳ���������,��ŷ����չ���dz���,���ڹ�����������AGV���̻�����������ŷ������.��Щ��ҵ����Ҫ��Ʒ�漰��Χ�ȽϹ�,��AGVϵͳ���������������з�����Ϊ��Ҫ��������,�Լ�һ���ؼ��豸���з�Ϊ��������.����,���NDC��˾�з������ϵͳ��������,�Լ��¹�Sick�з��ļ�����豸��.�������������ʾ,ŷ������Ŀǰ�д���������˾�з���AGVϵͳ,��Ӧ�õ���������վ����ͷ�ȸ�����������.1991�����NDC��˾���������Ĵ�������������AGVϵͳ[14].��ʮ�������,����ʱ�з��ļ����������Լ���,�״α�Ӧ�õ�AGVϵͳ��,�ɹ���Ϊ��һ����AGV���ܿ���ϵͳ,�����Ӹ��Ӹ�Ч������.�ձ���1963��������һ̨AGV�Ժ�,ÿ��������ʮ��AGVϵͳ.Ŀǰ�ձ���ס���ػ��������ع��������ع��ȼ�ʮ�ҳ��������������͵�AGVϵͳ[15].�ձ������Ĵ����AGV,��Ҫ�Ǽ����ͼ�����AGV,���߳�ΪAGC(AutomatedGuidedCart),�ü����������û������ʱ�����ջسɱ�,����AGV���ձ���̨�����ҵӦ��ʮ�ֹ㷺.
����AGV���ҹ����о���Ӧ�����Ƚ���.���ڹ��ڹ����ڲ��Զ����̶Ȳ���,�ټ����й���������Դ�ɱ�һֱ�������ڽϵ͵�ˮƽ,����ԭ���ӻ������й���AGV��չӦ��.20����70�������,�������������е�о����������ҹ���һ̨��ŵ�������ͨ��AGV--����ʽAGV:ZDB-I[16].80�������,������е��ҵ�Զ����о���Ϊ����������Ӧ�������廯�ֿ��е�AGV.�����Զ����о���Ϊ��������˾����������������������������װ���õ�AGV.90���,�廪��ѧ����CIMS�������Ľ��ӹ���������AGV�ɹ���Ӧ����EIMS��ʵ���о�[17].���������豸�о��������˼����ʽAGV,�����̲ݵ���ҵ�ɹ��ƹ�Ӧ��.����,��һЩ���Ͳֿ�,�Զ����ִ�ϵͳ,�ּ�ϵͳ��,Ҳ�д�����AGVӦ��.
������������ϵͳ��Ѹ�ٷ�չ,AGV��Ӧ�÷�Χ������չ,AGVϵͳ�ܹ��㷺�����ڹ�ҵ�����~����ͨ���䡢���ӵ�����,�������õĻ�����Ӧ����.Ԥ��2018��AGV�����˽���1.8��̨,ͬ��������40%.������,�ڹ��ڹ�ҵ�����������������Լ�"�й�����2025"���ǻ������ȸ������ߵı��ݻ�����,�ҹ�AGV��������������������[18].2013���ҹ�AGV����������Ϊ2439̨,2014��������3150̨,ͬ������29.15%;2016������Ϊ6500̨,ͬ������51.16%,2013-2016���긴�������ʴ�38.64%,�����ϴ����Ҫԭ��Ϊ���ִ̲�AGV��ʹ�ú��ƹ��Լ�����ۿ�AGV��Ӧ��[19].Ԥ��2018��AGV��������������1.8��̨,ͬ��������40%.��ͼ1-1��ʾ.

������������������,Ŀǰ�ҹ�AGV���������������Ϊ����,��Ҫ�ֲ���������ҵ���ҵ����������������,����������ҵ����AGV���������۶�ռ��24%,�ҵ�����ռ��22%.���˹�ҵ�����Ӧ����,AGV��ʼ����ҵ��ҵ�ƹ�Ӧ��,���ж�AGV���������ǵ��ִ̲��������̲ݺ�3C������ҵ,����ռ�ȷֱ�Ϊ15%��15%��13%[20].
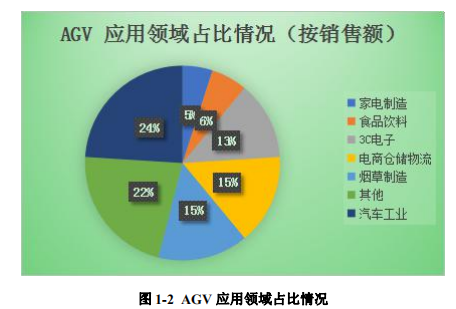
��������AGV��ҵԼ70��,����Ʒ��ռ���ʽӽ�90%.����AGV��������ҵ��Լ70��,�н�30��������������½������ҵ,��Ҫ�ǹ���AGVӦ���г��ڽ������������.Ŀǰ��ҵ��δ���ֹ�������˾�ͷ¢�ϵľ���,����Ʒ���г�ռ���ʽӽ�90%,���������͵��и߶��г������ɡ����������Ƶ�Ϊ����,�Ḻ�ص��еͶ��г���Զ�ܡ���˳���ܡ����ڵ�Ϊ����[21].
����1.3���������
�����ڴ�ͳ��ҵ�����Ļ�����,�ڱ�����ơ�Һѹת������Ӧ���������½�ϵͳ�������ش�Ľ�,�����������ʽAGV���̶Ѷ��������Ⱥ�Ż�����ϵͳ,���Բ������κ��ⲿ��ʶ��,ʵ��������λ�͵���,��Թ�������"С����,��Ʒ��"���ص�,ͨ����WMS/MES/ERP��ϵͳ�ں�,ʵ�ֿ��ٷ�Ӧ,��ȷִ�е�����ϵͳ,�����õ��ӱ�ǩ����,���������˺���Ϣ����Ϊһ�����������ƽ̨[22].
����������ϵͳ���Է�Ϊ�ĸ����:�����ʽAGV���̶Ѷ�����ԵĿ�λ��Ϣ����ϵͳ������ƽ̨����������ͨѶ.����ƽ̨��װ�ں�̨��������,��Ҫ������ܹ�ҵ��������������״̬����,Զ�̿��ơ����ݴ洢��������ָ���·��ȹ���;����ͨѶ������ɻ����˺�ϵͳ֮���ͨѶ;���ԵĿ�λ��Ϣ����ϵͳ�����ڹ������������и����ڵĻ���������;�����ʽAGV���̶ѶΪ������������ϵͳ�е�ִ����[23].
�������м����ʽAGV���̶Ѷ�������¹���:
����1.�������������ò���ʽ����,�ɲ�������Χ���˹���ʶ,ʵ�ֶ�λ����������;
����2.�ɷ���Ľ������Զ��л�,�����˹���ʻ�ֱ������˹�����;
����3.�����˾��а�ȫ����װ��,����:���߷������ü�������ͻ�е��ײװ��,���ǰ�����û�е��ײ,���ɼ��ǰ���ϰ���;������λ��װ�м�ͣ����;
����4.�����ѡ�����õ��ӱ�ǩ��дװ��,ͨ�����ӱ�ǩʶ��������Ϣ;��������ͷ�ܽ��ֳ�����ʵʱ���͵���غ�̨[24].
����5. �����ȼ�,IP �ȼ� 54,����ȼ� GB/T 2423.8-1995 ���� 2 �ظ����ɵ��� 200 ��.
����…………���ڱ���ƪ���ϳ�,��������ʡ��,��ϸȫ�ļ���ĩ����




������6�½���
����6.1�ܽ�
�����ڴ�ͳ����ҵ�ľ���������ҵĻ�����,AGV��������������˾���Ӱ��,���������Ͷ�����ҵ�����.�Դ�������һ̨AGV����,����AGV��������������,����,���ܵ�һ������ˮƽ���µĵ�AGV�����㲻���û�Ҫ����Ҫ��.���������������,�������Ӧ�Ը�ǿ,�˶��ṹ�����ӵ�˫��������ȫ��λ�ƶ�AGV,��ͬ��ҵ��ͬ���Ʒ�ľ�����,չ�������Ե�����.
�����ܽ�ȫ��,��������Ʒ���з�������,��Ҫ��������¼����ؼ�������:
����(1)�ڳ�ֿ���AGVϵͳ�Ĺ�������Ϳ�����Ŀ�ɱ���ǰ����,ѡ�����Ե���,�����ٶȸ���,��Χ��Դ�ḻ,����IntelN2600/N2800CPU,4GB�����ڴ�,500GB������Ӳ��.��������ߴ�С,���徫��С��,�ܹ�����ļ���������Ѳ�ӻ����˵Ŀ��ƻ�����.
����(2)�ڳ�����Ʒ���,���û���PLCϵͳ,רΪ��ҵ������Ƶ�һ��������������ĵ���װ��,������һ��ɱ�̵Ĵ洢��,�������ڲ��洢����,ִ��������,˳�����,��ʱ,���������������������û���ָ��,��ͨ�����ֻ�ģ��ʽ����/������Ƹ������͵Ļ�е����������.�ǹ�ҵ���Ƶĺ��IJ���.
����(3)�㷨��ѡ��Petri������ϵͳ,Petri����Ϊһ����Ч��ͼ�λ���ģ����������,���ܹ��Ƚ�ȫ���������AGV����ϵͳ�Ķ�̬����.�Ӷ�ʹ������Ч�ʵõ����.
���������о���Ŀ��ʵʩ������,�����������Ŀ��ǰ�ڵ��С���ơ����������Ժ�Ӧ��ʾ����һϵ�й���,���ռƻ�����˺�ͬ�涨�ĸ�������,����ܺ�ָ���������Ŀ��ͬ��Ҫ��.��������Ŀ�ɹ�,�Ѳ��������õľ��ú����Ч��.���Ų�Ʒ�Ľ�һ������ͽ�һ�����ƹ�,Ԥ���ܴ�����ߵľ���Ч��,�����ڹ�ҵ�������漰���ֻ�������ҵ�з��Ӿ�����,ͬʱҲ����������ز�ҵ�ķ�չ�����õĴ����ͷ�������.
����6.2������չ��
��������ʱ���Լ�������ѧ֪ʶ����,��˱����е��о���ģ�ͺͳ����ļ�,����һ���IJ���.
����(1)��AGV·���滮������һ���dz����ӵĶ�����˿�������.������ֻ�����ijһ�ֳ��������˷���,����Ҫ�ڶ��ֻ�����,��һ��ʹ����ʵ�Ķ��AGV,��һ������,���жλ�Ƚ�������㷨��Ч�Ժ�ϵͳ�ɿ���.
����(2)����AGVϵͳ����·����ͨ״���ļ��ɵ������ⷽ��:�������ڸ��������,��ʵ������ϵͳ����������г���̽��.�ڱ��ĵĻ�����,Ӧ�öԸ���ϵͳ����ʽ����ģ����,�ر����ڸ���·�������µĽ�ģ����ȷ������������о�.
����(3)��δ��,AGVϵͳ�����������ܻ�����Ϣ�������Ի������ݻ������ܻ�����ɫ���ȹ���Ҫ�����һ���Ľ�����.
���������о�AGV����ϵͳ��δ�����������¼������淢չ.
����(1)�����о�AGV����ϵͳֻ���ڵ����άƽ�����,���δ���������˻��п���������ռ�����Ͻ��л������ͨ�����.
����(2)���������AGV����ϵͳ������AGVȺ�е�Ӧ��.�������AGV����ϵͳ��Ϊ����AGVȺ�ṩ���õĵ���ָ��,��δ��AGV�ķ�չ�������õ��о�ǰ��.
������ �� �� ��
����[1] ������. ��������ϵͳ[M]. ����: ��е��ҵ������, 1998.
����[2] ���־�, ʩҵ��, Τ����. ���� AGV �������й���Ӧ���뷢չ̽��[J].�Ƽ���Ѷ, 2007(34): 148-149.
����[3] ��С��, ������, ���ʯ, ��. ȫ��λװ���� AGV �Ĺ���Ӧ��[C]. 2001 ���й������Զ����� �����ļ�(�ϲ�). 2001: 555-559.
����[4] �����˼������ҹ����о�����, �п�Ժ�����Զ����о���. AGVS ��Ʒ����Ӧ��[J]. �����˼� ����Ӧ��: 1999(04): 3-14.
����[5] �Ż���, ����. AGV �Զ�������[J]. ����һ�廯, 1996(3): 4-6.
����[6] ��ƽ, �Ժ���. AGV �� AGVS �����о�[J]. ��ϻ������Զ����ӹ�����, 2002(2): 21-24.
����[7] Se S, Lowe D, Little J. Local and global localization for mobile robots using visual landmarks[C]. IEEE/RSJ International Conference on Intelligent Robots & Systems, 2001, 1(1): 414-420.
����[8] Se S, Lowe D, Little J. Global localization using distinctive visual features[C]. IEEE/RSJ International Conference on Intelligent Robots & Systems, 2002(1): 226-231.
����[9] ���. ȫ���Ӿ����� AGV ����ԭ���뼼�����о�[D]. �人������ѧ, 2007.
����[10] Ji Shouwen, Li Keqiang, Miao Lixin. Design of a new type of AGV based on computer vision[J]. Chinese Journal of Mechanical Engineering, 2004, 17(1): 97-101.
����[11] ��˼Ң, ����. ���ڲ����۵� AGV ϵͳ�Ż�����ģ��[J]. ��ͩѧԺѧ��, 2008, 18(6): 54-59.
����[12] ��־��. Petri ������������ϵͳ��ģ������е�Ӧ��[M]. ����: ��е���̳�����, 2004.
����[13] Castillo O, Aguilar L, Cazarez N, et al. Systematic Design of Stable Type-2 Fuzzy Logic Controller[J]. Applied Soft Computing, 2008, 8(3): 1274-1279.
����[14] ����. ���ܲ泵��������������[J]. �ִ�����, 2013(23): 36-37.
����[15] ����, ����. ���� HCS12 ��Ƭ��������Ѱ��ģ�ͳ��������ʵ��[J].��������������, 2008, 29(18): 4736-4739.
����[16] Ran-Xuan K E, Ren Y D, University J. Study on Optimizing AGV Control in Container Terminals[J]. Journal of Jimei University, 2016.
����[17] ���, ����, ������, ��. ���� HCS12 ��С�����ܿ���ϵͳ���[J]. ��Ƭ����Ƕ��ʽϵͳӦ��, 2007, 7(3): 51-53.
����[18] ��÷, �ں�, �ڵ�. ���� HCS12 ��С�����ܿ���ϵͳ���[J]. ұ���Զ���, 2009, 33(s2).
����[19] �ƴӺ�, �º���.���� HCS12 ����Ѱ������С������ϵͳ���[J]. ���繤�̼���, 2008, 37(12): 30-32.
����[20] ������. ���� AVR ��Ƭ�������ܱ���С�����[J]. �Զ���������Ӧ��, 2014, 33(6): 95-97.
����[21] ����, л˩��, ������. ����M68HC711E9��Ƭ���IJ��ͳ����Զ�������ϵͳ�����Ӧ��[J]. �������Ϣ, 2006(08): 12-15.
����[22] Sheth S, Ajmera A, Sharma A, et al. Design and Development of Intelligent AGV Using Computer Vision and Artificial Intelligence[J]. 2018.
����[23] ����ƽ, �����, κѧ��, ��. MC68HC05PV8�����������е�����[J]. �Ϻ�����, 2002(4): 17-20.
����[24] ������, �����, ţѧ��. ���� HCS12 ��Ƭ�������ܳ����[J]. �ǻ۹���, 2011(6): 80-82.
����[25] �ܽ���. ﮵��� HC-1 ����Դ��ɨ���ϵ�Ӧ��[J]. ������ҵ�о�, 2018(5).
����[26] Wang Q H, Huang J J, Jian-Yao H U. AGV Tracking Algorithm on Ultra Wide Band Location[J]. Journal of Signal Processing, 2017.
����[27] Shao X, Gao Y, Song R, et al. Multi-target Compounded AGV Scheduling System Modeling and Application in Electric Power Metering Calibration[J]. Jiangsu Electrical Engineering, 2016.
����[28] ����, �����, �Ҷ˷�. ���� HCS12 �Ŀͳ��DZ���Ϣϵͳ���[J]. ��������, 2009(2): 11-14.
����[29] �Ž�, ������, κѧ��. ���� CAN ���ߵ� HCS12 ���� ECU ���߱궨ϵͳ���[C]. 2007 �й��� ������ѧ�����, 2007.
����[30] Wang T, Xu Y, Ahipasaoglu S, et al. Ex-post Max-min Fairness of Generalized AGV Mechanisms[J]. IEEE Transactions on Automatic Control, 2016, PP(99):1-1.
����[31] ��˫, ��Сΰ, ��ƽ, ��. M68HC908EY16 ������ LIN ���ߵƿ�ϵͳ�е�Ӧ��[J]. �Ƽ���Ѷ, 2007(29): 8-9.
����[32] ����, �ⶨ��, �³�, ��. ����HC9S12DG128B���ƶ�С�����������[J]. �ɱ�̿������빤�� �Զ���, 2008(8): 95-98.
����[33] ��Դ. �������� HC ����������Ŀ��Ա��Ч������ϵ�Ż�����о�[D]. ������ѧ, 2014.
����[34] Miyamoto T, Inoue K. Local and random searches for dispatch and conflict-free routing problem of capacitated AGV systems[J]. Computers & Industrial Engineering, 2016, 91:1-9.
����[35] ����ҫ, Ԭ����, ������,��. һ���䱸���ܻ�е�۵� AGV �����ʵ��[J]. �����Զ���, 2016, 35(10):38-41.
����[36] Lu S, Xu C, Zhong R Y. An Active RFID Tag-Enabled Locating Approach With Multipath Effect Elimination in AGV[J]. IEEE Transactions on Automation Science & Engineering, 2016, 13(3):1333-1342.
����[37] �Զ���. ���ڵ�Ƭ�������ܳ��ײ����ϵͳ���[J]. ũ��ʹ����ά��, 2011(1): 28-30.
����[38] ������, Ҷ��. ���ܳ��������������[J]. ��������, 2018(13).
����[39] ����. �ֵ²泵: �������������Ч--ר���ֵ�(�й�)�泵����˾[J]. �й�����, 2017(8).
����[40] ����. �ֵ²泵 ����ϵͳ��Խ� �����˴����¼�ֵ[J]. �й�����, 2017(7): 63-65.
����[41] Mousavi M, Yap H J, Musa S N, et al. Multi-objective AGV scheduling in an FMS using a hybrid of genetic algorithm and particle swarm optimization:[J]. Plos One, 2017, 12(3):e0169817.
����[42] ������, ¥���. ����������ķֲ�ʽ�� AGV ����ϵͳ�����ʵ��[J]. ��ҵ���Ƽ����, 2013, 26(9):37-38.
����[43] ����, ¥���. ���� Multi-Agent �Ķ� AGV ��������ϵͳ�����ʵ��[J]. ��ҵ���Ƽ����, 2011, 24(10):29-31.
����[44] ������, ������, ������,��. ���� AGV ���䳵����ϵͳ���[J]. �ǻ۹���, 2017(9):69-71.
����[45] �ƳϽ�. ���� AGV ϵͳ��Ƽ�·���滮�㷨�о�[D]. ����ũ�ִ�ѧ, 2016.
����[46] Draganjac I, Mikli? D, Kova?i? Z, et al. Decentralized Control of Multi-AGV Systems in Autonomous Warehousing Applications[J]. IEEE Transactions on Automation Science & Engineering, 2016, 13(4):1433-1447.
����[47] ������. AGV ����ϵͳ��Ƽ�����[D]. ������ҵ��ѧ, 2002.
����[48] Huo K G, Zhang Y Q, Zhi-Hua H U, et al. Research on scheduling problem of multi-load AGV at automated container terminal[J]. Journal of Dalian University of Technology, 2016.
����[49] ������. CeMAT ASIA 2015 ���ܲ泵��ʷ׳�[J]. ��������, 2015, 34(18): 21-22.
����[50] ����. ��ȫ���ܻ��Ķ���ѡ���ڲ泵�ϵ�Ӧ�úͷ�չ[J]. ��ȼ�������, 2017(24): 140-141.
����[51] ��Ԩ��, ��ϼ. ���� UWB ���������ߵ��� AGV ���������[J]. ���ܻ�����, 2017(5):59-61.
����[52] ����, ����, ����,��. һ�ֻ��� AGV С�������������ּ�ϵͳ[J]. ɽ����ҵ����, 2018(16).
����[53] ��ӨӨ. �Զ�����ϵͳ�Ļ�е�ֺ� AGV �������ؼ������о�[D]. ������ͨ��ѧ, 2016.
����[54] �����, ����. �Զ�������ֿ������� AGV Ⱥ��ľ�̬·���滮�붯̬���Ͼ����о�[J]. ���� ����, 2017, 36(6):170-178.
����[55] ��СԪ, ����, ������,��. ���� MAS �Ķ� AGV �Զ�������ֿ�ϵͳ���[J]. ���ƹ���, 2005, 12(5):464-467.
����[56] ����, ����Ρ. ���� AGV �Ķ����ܳɹ�����������ϵͳ�����[J]. �Զ���Ӧ��, 2017(11).
����[57] ŷ����. ���ڶ� AGV �����ִܲ�����ϵͳ������������[J]. ��ҵ���Ƽ����, 2017, 30(10):134-136.
����[58] ������, ¥���. ����������ķֲ�ʽ�� AGV ����ϵͳ�����ʵ��[J]. ��ҵ���Ƽ����, 2013, 26(9):37-38.
����[59] �� �� , �� �� , �� �� �� . �� �� �� �� �� (AGV) �� �� �� �� ϵ ͳ �� �� �� [J]. �� �� �� Ʒ �� �� �� , 2009(1):87-93.
����[60] ��˧, ������, ������,��. ���� AGV С������ϵͳ���[J]. ��ְͨҵ��ѧѧ��, 2016, 30(1): 96-10





