自动驾驶论文范文第六篇:以安全分析发展角度探讨自动驾驶车辆安全需求
摘要:对产品安全认知的内涵与演进进行了剖析,从安全分析发展的角度梳理产品安全理念的发展,提出了有限性视域下的自动驾驶车辆安全需求。产品安全的本质是产品所处的风险状态,与社会发展协调同步。自动驾驶车辆除了要满足功能安全、预期功能安全、网络和数据安全外,还应有韧性安全需求。为理解产品安全认知的演进和自动驾驶安全需求分析的构建提供了思路。
关键词:产品安全,自动驾驶;功能安全,预期功能安全,韧性安全,
作者简介:董红磊(1982-),男,山东昌邑人,博士,高级工程师,主要研究方向为汽车产品安全、缺陷评估技术及召回管理。Tel:18618384455E-mail:donghl@dpac.gov.cn;
Abstract:The paper analyzes the conceptual development of product safety and puts forward the safety requirements for autonomous vehicles with a limited visual field. The essence of product safety is the risk status of product, which is coordinated with social development. In addition to the requirements of functional safety, safety of the intended functionality and data and network security, the resilience requirements need to be included for autonomous vehicles. This paper provides both an understanding of the conceptual development of product safety and some suggestions on safety requirements for autonomous vehicles.
Keyword:product safety; autonomous driving; functional safety; safety of the intended functionality; resilience safety;

产品安全是近年来的热点问题,高质量的生活需求使人们不仅关注产品的便利性,更关注安全性。以汽车产品为例,2018年全国消费者协会收到汽车投诉(含零部件)1.9万件,其中消费者关心的安全权占47%.近几年,我国汽车召回年均220余次,呈常态化发展趋势。截至2019年底,已实施召回1 991次,涉及缺陷车辆7 578.01万辆。自动驾驶汽车在减少交通事故量、增进特定群体移动、减少环境污染和舒缓城市拥堵等方面优势突出。电气和电子工程师协会(Institute of Electrical and Electronics Engineers,IEEE)预测,2040年将有75%的车辆采取自动驾驶运行模式。然而,自动驾驶汽车是对人类能力的延展,公众当前普遍的担忧仍集中于"安全"这一议题。
安全表征产品的瞬时特征和使用特性,作为一种状态是不可度量与比较的。安全性是保障产品使用安全的能力体现,与可靠性、维修性等的概念内涵相同,是可度量与比较的。现代产品不仅需要高可靠性以保证完成规定任务,还需要具备高安全性以保证人员、设备/设施免受损失或环境损害。随着人们认识的不断加深及社会需求的不断发展,安全认知呈现动态演变过程。国内外学者结合各自领域不同类型的安全现象、事故类型及其发展规律,阐述不同的安全观念。产品安全的本质是产品所处的风险状态与社会发展协调同步。本文剖析了产品安全认知的演进,探讨自动驾驶汽车的安全需求。
1 产品安全认知演进
概念是科学认知的主要成果和形式,体现了人们对过去认识的归纳和提炼,也是开始新认识的逻辑起点。在工业革命初期,安全概念来自于对"不安全"的致因认识。安全就是没有危险,不触发事故。从事故预防角度,形成了通过减小危险事故发生的可能性和通过保护来避免有害结果这两种安全手段。20世纪后期,人类迈入"风险社会"[1].产品安全体现出产品所处的风险状态,当风险状态在人们可接受的水平范围内时,认为产品是安全的。风险表征产品从安全隐患到触发事故到造成后果的各个阶段都具有不确定性。基于风险的不确定性特征来定义安全,既可修正追求绝对安全的做法,也可避免"不发生事故就是安全"的片面认识,实现通过风险控制来保障系统的协调运用。至此形成两种安全概念认知:一是事后型的指向事故,即安全就是不发生事故的状态;二是预防型的指向风险,即安全就是风险处于可接受的状态。
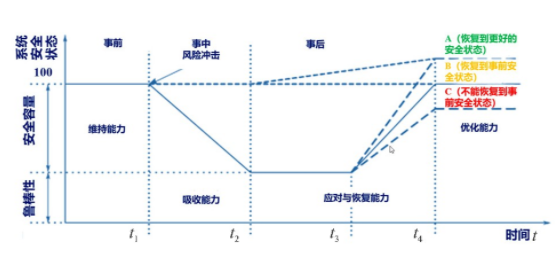
近年来,人工智能、大数据等技术的应用带来了许多未知的、变化的和不确定的风险。为了保障不可预测扰动下系统的可持续性,相关学者提出韧性安全的概念[2,3].韧性表征系统应对变化或干扰的能力,包括降低风险和损失的能力、吸收冲击和干扰的能力、通过自学习和再组织恢复原来状态或达到新状态的能力[4].MACASKILL等[5]指出,严格统一的定义系统韧性不切实际,需根据实际应用定义符合该领域的韧性。SPERANZA等[6]指出,韧性应包括向事故学习的能力,即把系统所遭受的风险冲击和扰动视为改变和优化系统安全状态的条件。美国国土安全部研究指出,韧性是能够使系统对逆向事件所产生的负面影响进行抵御、吸收和恢复的能力,这种能力贯穿于事前、事中和事后全过程。黄浪等[7]利用系统在事前、事中和事后的动态响应,构建了系统安全韧性概念框架(图1)。在0<t<t1时段,系统处于安全状态;t1时刻系统遭受风险冲击或扰动,超过系统裕度而使系统处于破坏期(t1<t<t3);t3时刻采取措施使系统进入恢复期(t3<t<t4);通过系统自我恢复和适应能力,系统可恢复到安全状态(C),也可恢复到事前安全状态(B),还可通过自学习恢复到更好状态(A)。因此,韧性强调了系统"自学习、恢复、适应、避免"的需求,韧性安全是在预期或者非预期的条件下,确保所期望的可接受的结果最大化的能力。
图1 系统安全韧性概念框架
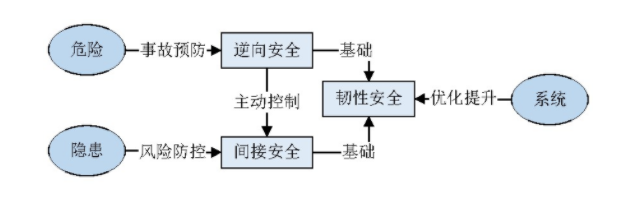
综上所述,随着安全认知的深入,安全概念不断纳入新理论,呈现出更加客观、丰富而非取代的过程。安全概念发展演进路线如图2所示,从事故预防角度逆向定义安全(从危险出发以事故预防为主线)、从风险控制与管理角度间接定义安全(从隐患出发以风险控制为主线)和从韧性需求角度直接定义安全(从系统出发以优化提升为主线),体现了安全概念内涵和外延的不断拓展和人们认知水平的不断提升。如果系统必然会受到意外事件的侵袭,以有准备、有策略的方式来降低不利事件对系统的冲击,可在危险降临时争取到有利的局面并迅速采取措施修复,成为增强系统安全的新理念。系统层面的安全,其本质是减少事故发生概率和降低事故损失,提高系统从事故中恢复的速度和向事故学习的能力。在实操层面,突出事前的"预防、预测"和事中的"响应、应对",强调事后的"恢复、提升".
图2 安全概念发展演进路线
2 自动驾驶安全需求探讨
2.1 自动驾驶分级
自动驾驶汽车是指能够以高度智能化的方式实现自主环境感知、行驶规划决策和车辆控制功能的车辆。系统架构包括感知层、认知层、决策层、控制层和执行层,用于完成感知定位、路径规划、行为预测、轨迹生成和控制执行功能。根据车辆驾驶过程中人类驾驶员和驾驶系统承担的驾驶职责,国际汽车工程师协会(SAE International)将自动驾驶技术划分为非自动(Level 0)、驾驶员辅助(Level 1)、部分自动(Level 2)、有条件自动(Level 3)、高度自动(Level 4)和完全自动(Level 5)。在前3个分级中,人类驾驶员始终是车辆的驾驶主体;在L3级以上(L3级与L4级的本质区别在于当系统提出请求时,人类驾驶员是否必须作出应答并接管车辆)时,驾驶系统取代人类驾驶员执行驾驶任务。具体分级原则见表1.
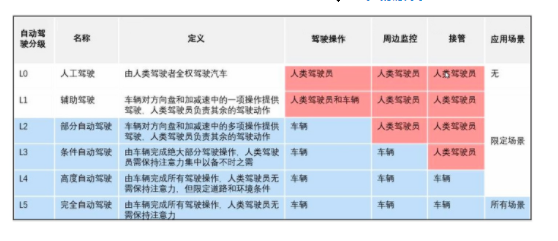
表1 SAE自动驾驶分级[8]
我国《汽车驾驶自动化分级》(征求意见稿)基于驾驶自动化系统能够完成动态驾驶任务的程度,根据在执行动态任务中的角色分配以及有无设计运行范围限制,将驾驶自动化分为0~5级。0级(安全辅助)指驾驶自动化系统不能持续执行动态驾驶任务中的车辆横向或纵向运动控制,但具备持续执行动态驾驶任务中的部分目标和事件探测与响应的能力;1级(部分驾驶辅助)指驾驶自动化系统在其设计运行范围内持续执行动态驾驶任务中的车辆横向或纵向运动控制,且具备与所执行的横向或纵向运动控制相适应的部分目标和事件探测与响应的能力;2级(驾驶辅助)指驾驶自动化系统在其设计运行范围内持续执行动态驾驶任务中的车辆横向和纵向运动控制,且具备与所执行的横向和纵向运动控制相适应的部分目标和事件探测与响应的能力;3级(有条件自动驾驶)指驾驶自动化系统在其设计运行范围内持续执行全部动态驾驶任务;4级(高度自动驾驶)指驾驶自动化系统在其设计运行范围内持续执行全部动态驾驶任务和执行动态驾驶任务接管;5级(完全自动驾驶)指驾驶自动化系统在任何可行驶条件下持续执行全部动态驾驶任务和执行动态驾驶任务接管。
2.2 自动驾驶安全需求
2016年1月,一辆启动自动驾驶功能的特斯拉轿车在京港澳高速公路河北邯郸段,因未能及时躲避前方的道路清扫车而发生追尾,事故导致车主身亡。2016年5月,一辆特斯拉Model S电动汽车在自动驾驶模式下与一辆正在左转的大型牵挂型卡车发生碰撞,原因是卡车大面积白色车厢与明亮的天空相近,自动驾驶系统"看到了"卡车,但未能判别出风险。2018年3月,一辆Uber自动驾驶汽车撞死了一名突然横穿马路的妇女。自动驾驶受到光照条件、道路条件、复杂路况和恶劣天气等诸多环境因素影响,导致车辆在不确定的开放环境下无法有效感知和准确识别。自动驾驶技术会大大降低人因失误引发的事故,但仍无法消除诸多可能引发事故的因素,也会带来新的事故模式和安全风险。
2.2.1 功能安全
自动驾驶功能的实现要依靠大量电子电器系统的集成和控制,电子电气系统的功能安全是汽车自动化的关键。功能安全是指避免由于系统功能性故障导致的不可接受风险,主要针对与安全相关的由电子电气系统故障引起的危害分析。ISO 26262《道路车辆-功能安全》是IEC61508对电子电气系统在道路车辆方面的功能安全的具体应用,规定了道路车辆上特定的由电子、电器和软件组成的安全相关系统在概念阶段、产品开发和生产发布全生命周期内与功能安全相关的工作流程和管理流程。基于功能安全的产品生命开发周期包括3个阶段:概念阶段、产品开发和生产发布之后,如图3所示[9].
图3 基于功能安全的产品生命开发周期
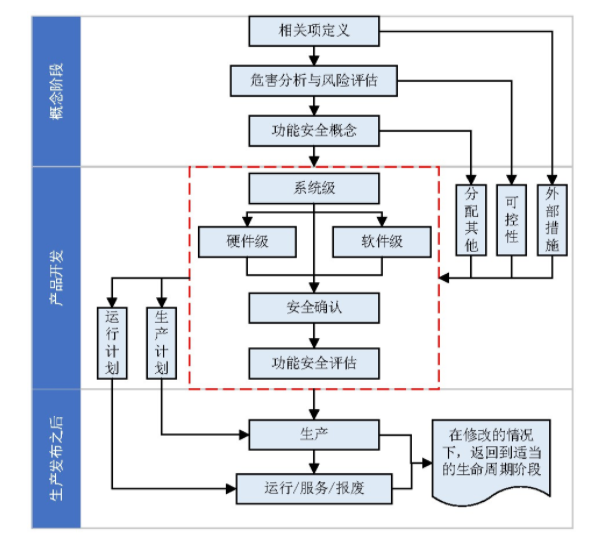
2.2.1. 1 概念阶段
该阶段包括相关项定义、安全生命周期启动、危害分析和风险评估、功能安全概念4部分内容。根据产品的功能定义对相关项进行定义和描述,包括相关项与其他相关项和环境的交互作用和相互影响、功能在所涉及的系统和要素的分配等;以相关项为基础进行危害分析和风险评估(Hazard Analysis and Risk Assessment,HARA),对功能潜在故障进行识别并对其产生的危害进行分类,确定功能安全目标,以及从暴露度、严重度和可控性3个纬度影响因子分析汽车安全完整性等级(Automobile Safety Integrity Levers,ASIL)。功能安全概念源于功能安全目标,目的是当系统发生故障后使其进入安全的可控模式。
2.2.1. 2 产品开发
基于概念阶段分析得出的功能安全要求,提出系统层、硬件层和软件层的技术要求,并指导各个层级的设计开发,经功能安全确认和功能安全评估后通过产品生产发布。
2.2.1. 3 生产发布之后
以产品的生产计划和运行计划为基础,执行基于功能安全的生产、运行、服务和报废过程的活动。
2.2.2 预期功能安全
预期功能安全是指通过一系列确认和验证手段,探测和发现系统感知、逻辑决策和功能执行中的非失效不足,通过功能改进使自动驾驶车辆在预期使用工况下达到合理安全水平的技术。预期功能安全主要针对自动驾驶系统非故障原因导致的危害,涉及环境干扰、识别错误、预警交互信息缺失、系统决策失误、逻辑错误、响应延迟和乘员误操作等问题。ISO/PAS 21448《道路车辆-预期功能安全》对预期功能安全实现思路和流程进行了规范,以系统功能定义为中心,进行危害分析和风险评估,找出可能导致危害的使用案例,对于不可接受的功能予以改进。
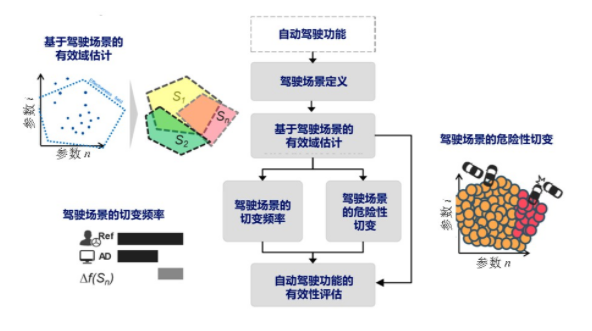
预期功能安全评估需要依托典型用例进行评估验证,自动驾驶场景构建是关键。ISO/PAS 21448将场景划分为4个区间(图4),包括已知安全、已知不安全、未知安全和未知不安全4类。在自动驾驶场景中尽可能缩小已知不安全和未知不安全的场景比例,确保场景控制在安全区间。国家市场监管总局缺陷产品管理中心学者针对自然驾驶道路测试方法存在的时间成本大、效率低且危险场景覆盖面不足的问题,提出了危险场景批次性衍生的路径及关联关系(图5),并以国家车辆事故深度调查体系事故数据为基础构建了考虑人-车-路-环境等因素的场景衍生和演绎方法。德国亚琛大学R?SENER指出,自动驾驶使用场景不一定包含在基于人类驾驶已经发生的事故场景中,需要提出新方法模拟自动驾驶功能,提出综合考虑驾驶场景频率预测的安全影响评估的总体方法(图6)。流程包括定义自动驾驶场景、模拟基于驾驶场景的有效领域、考虑发生驾驶场景的频率变化和驾驶场景发生事故的严重度变化,最后评估自动驾驶功能的有效性。
图4 已知/未知和安全/不安全场景类别定义[10]
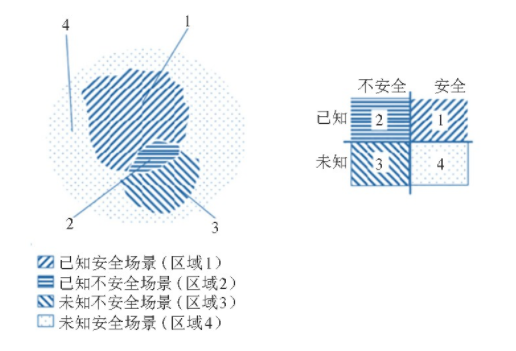
图5 危险场景批次性衍生示意图

图6 自动化驾驶安全影响评估的总体方法[11]
2.2.3 网络与数据安全
自动驾驶除自身传感器外,还会通过网络与其他车辆、基础设施及其人员互联互通,存在因网络漏洞而受到攻击的情况。DFF CON在2011年黑客大会上短信解锁斯巴鲁傲虎,在2013年通过OBD-II控制了福特翼虎和丰田普锐斯的方向盘、制动、油门等[12].菲亚特克莱斯勒在2015年因网络安全问题召回140万辆汽车。美国独立研究机构波莱蒙(Ponemon Institute)公布了一项有关汽车网络安全的调查结果指出,未来将有60%的车辆因软件安全问题被召回,汽车受到信息安全攻击的威胁正逐步提升[13].此外,2016年法国尼斯卡车致84人死亡的恐怖事件警示,如果自动驾驶汽车被恐怖分子劫持,将是发动恐怖袭击的有利武器。网络安全的核心要义是自动驾驶系统的每个制造商应制定、维护和执行网络安全计划,以最小化由网络安全威胁和漏洞带来的安全风险。美国S.1885法案指出,除制定网络安全计划外,制造商可建立以自愿协调一致为基础的漏洞披露政策,安全研究人员将其发现的与漏洞相关的信息通知制造商,建议其确认和修复漏洞。
自动驾驶系统是由上千个电子控制单元通过车载网络进行控制的智能移动终端,可以自动收集与保留数据信息。这些信息不仅关系个人隐私,还与人身财产安全和国家安全直接相关。目前还没有法规明确这些数据信息的终端汇聚地,以及查阅和使用这些信息的权限边界,导致这些信息随时可能被泄露或恶意利用。近期爆发的亚马逊数据泄露事件和棱镜门事件都应引起对自动驾驶数据安全和隐私保护的思考。据统计,有56%的消费者表示数据安全将成为未来购买汽车时的主要考虑因素。2016年,美国《汽车最佳网络安全指南》明确表示要对自动驾驶汽车实施网络安全测试,防止汽车接入未授权的网络,保护关键安全系统和个人数据。2017年,美国《自动驾驶法案》明确规定,自动驾驶汽车生产厂商需制定和说明如何收集、使用、分享和存贮自动驾驶汽车用户信息的"隐私方案",要求运用数据缩小化和去识别化技术防止用户留存信息被泄露。然而,由于缺少规范的安全监管标准和流程,目前绝大多数厂商不能对其产品进行必要的安全性测试,更无法保障这些数据的安全。因此,应从法律层面尽快对自动驾驶数据安全进行规范,明确自动驾驶汽车获取数据的属性,即哪些数据可以被采集及其使用边界。
2.2.4 韧性安全
自动驾驶技术会大大降低人因失误引发的事故,但"零伤亡"仍是愿景。因此,在事故发生前,自动驾驶系统生产者和其他实体应使用识别、保护、检测、响应和回复等功能对其做出风险管理决策,尽量消除风险和威胁;采用"黑盒子"等技术记录追溯事故发生前以及发生时所有的行为、改动、设计选择、分析、关联测试和数据;在事故发生后,鼓励共享事故信息和网络安全数据,以便从中吸取经验教训并促进行业整体质量提升。
美国《自动驾驶系统2.0:安全愿景》针对耐撞性提出两项要求:一是乘客保护,即无论是在自动驾驶还是人工驾驶模式下,一旦系统出现故障,乘客保护系统均应保持其预期的性能水平;二是兼容性,即用于提供产品、服务或应用于其他场景的自动驾驶车辆应符合与道路上现有车辆的碰撞兼容性。当驾驶系统失效时,被动安全系统是车辆碰撞后乘员保护的最后一道屏障,需要通过优化乘员约束系统减轻伤害或防止车内人员伤亡。PIPKORN等[14]通过试验和仿真表明,目前的乘员约束系统在80 km/h的碰撞速度下对驾驶员的保护作用不够,相关伤害指标远超FMVSS 208中规定的损伤容限。因此,相关学者提出需针对不同碰撞强度设计可调节式的自适应约束系统,以应对未来交通事故场景中乘员智能保护的挑战[15].
自动驾驶系统是具备自学习的强人工智能系统,以韧性安全为基础来提高系统从事故中恢复的速度和向事故学习的能力,自动驾驶汽车经历碰撞事故后应迅速恢复到安全状态。具体行为包括自动关闭油门、移除动力装置、移动车辆到安全位置、关闭电源等。如果传感器或与安全相关的控制系统出现故障,车辆应在最低的风险状况下运行,直至功能恢复正常。车辆生产者或其他实体应对自动驾驶车辆的相关维修记录进行存档,以确保修复后的自动驾驶车辆能够被调整至更安全的状态。
3 结论
自动驾驶汽车综合运用了人工智能、信息物理融合和大数据分析技术,是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的智能系统。对智能化的追求应当建立在安全之上,失去了安全性的智能化都是空谈。即使最好的汽车安全科技也不能确保挽救每一个生命,对于安全科技效用的限制在于人们使用它的方式。自动驾驶汽车较传统汽车安全,除了要满足功能安全、预期功能安全、网络和数据安全外,还应满足韧性安全。如果该系统受到意外事件的侵袭,以有准备、有策略的方式来降低不利事件对系统的冲击,提高系统从事故中恢复到正常状态的速度和向事故学习的能力。基于产品安全认知演进规律分析自动驾驶安全需求,不仅突出事前的"预防、预测"和事中的"响应、应对",还要强调事后的"恢复、提升",为自动驾驶安全技术发展提出了建议和思路。
参考文献
[1]乌尔里希贝克风险社会[M].何博文,译南京:译林出版社, 2004. BECK U. Riskogesellschaft:Auf dem Weg in Eine Andere Moderne[M]. He Bowen,Translate. Nanjing:Yilin Press,2004. (in Chinese)
[2]WANG Junwei,MUDDADA R R,WANG Hongfeng,et al. Toward a Resilient Holistic Supply Chain Network System:Concep,Review and Future Direction[J]. IEEE Systems Journal,2016, 10(2):410-421.
[3]WALKER B,SALT D. Resilience Thinking:Sustaining Ecosystems and People in a Changing World[M]. Washington DC:lsland Press,2006.
[4]黄浪,吴超,王秉系统安全韧性的塑造与评估建模[J].中国安全生产科学技术, 2016,12(12):15-21.HUANG Lang,WU Chao,WANG Bing. Modeling ofSystem Safety Resilience Shaping and Assessment[J]. Journal of Safety Science and Technology,2016, 12(12):15-21.(in Chinese)
[5]MACASKILL K, ,GUTHRIE P. Multiple Interpretations of Resilience in Disaster Risk Management[J]. Proceeds Economics and Finance ,2014,18:667-674.
[6]SPERANZA C I,WIESMANN U,RIST S. An Indicator Framework for Assessing Livelihood Resilience in the Context of Social-Ecologic al Dynamics[J]. Global Environmental Change ,2014,28(1):109-119.
[7]黄浪,吴超,杨冕,等。韧性理论在安全科学领域中的应用[J]中国安全科学学报, 2017,27(3):1-6.HUANG Lang,WU Chao,YANG Mian,et al. Application of Resilience Theory in Field of Safety Science[J]. China Safety Science Journal,2017,27(3): 1-6.(in Chinese)
[8]The SAE On-Road Automated Vehicle Standards Committee. Taxonomy and Definitions for Terms Related to On-Road Motor Vehicle AutomatedDriving Systems[R]. USA:SAE International,2014.
[9]王俊明,周宏伟基于ISO26262的车道保持辅助的功能安全概念设计[J]重庆交通大学学报(自然科学版) , 2019,38(3):135-142.WANG Junming ,ZHOUHongwei. Concept Design of Functional Safety for Lane Keeping Assistance Based on ISO26262[J]. Chongqing Jiaotong University(Natural Science),2019,38(3):135-142. (in Chinese)
[10]ISO/PAS21448. 2019 Road Vehicles- Safety of the Intended Functionality[S]. Switzerland:International Organization for Standardization,2019.
[11] ROSENER C,HENNECKE F,SAUERBIER J,et al.A Traffic Based Method for Safety Impact Assessment of Road Vehicle Automation[C]/12. Uni-DAS e.V. Workshop Fahrerassistenz und automatisiertes Fahren. Walting, Germany:Researchgate ,2018.
[12]CHECKOWAY S,MCCOY D,KANTOR B,et al.Comprehensive Experimental Analyses of Automotive Attack Surfaces[C]/Proceedings of the 20thUSENIX Conference on Security. San Francisco,CA:USENIX Association,2011:1-16.
[13]CARTER G. Car Cybersecurity:What Do the Automakers Really Think?[R]. Traverse City:Ponemon Institute, 2015.
[14]PIPKORN B,MELLANDER H,HAL AND Y. Car Driver Protection at Frontal Impacts up to 80 km/h(50mph)[C//Proceedings of 19th InternationalTechnical Conference on the Enhanced Safety of Vehicles(ESV) Washington,DC:National Highway Traffic Safety Administration,2005:1-8.
[15]周青,姬佩君,黄毅,等。未来交通事故场景中乘员智能保护的挑战与机遇[J].汽车安全与节能学报, 2017,8(4):330-350 ZHOU Qing,JI Peijun,HUANG Yi,et al. Challenges and Opportunities of Smart Occupant Protection Against Motor Vehicle Collision Accidents in Future Traffic Environment[J].J Automotive Safety and Energy,2017 ,8(4):330-350. (in Chinese)





