
0、 引言
采摘机器人的末端执行器直接与采摘目标相接触,是采摘机器人实现果蔬采摘的关键执行部分,直接决定了果蔬采摘品质。
果实物理参数为采摘机器人的末端执行器设计提供了理论依据,手指的形状和尺寸往往与果实相适应。采摘机器人的末端执行器手指类型有凹型( 如弧形面)和凸型( 如棒形),两种均采用软硅胶等材料包裹增加缓冲。当手指夹持力过大,超过果实组织的损伤阈值时,果实将会产生机械损伤。
相关研究中,Seyed Mohammad Ali Razavi 对伊朗猕猴桃果实的物理参数进行了详细探讨。与果实的机械损伤相关的报道中,主要以果实宏观机械损伤的力学特性参数指导末端执行器设计,但猕猴桃果实存在延迟损伤,早期的微损伤导致果实后期发生品质腐败。因此,以猕猴桃果实微损伤力学特性参数指导末端执行器设计更接近实际。目前,已有学者对果实微损伤进行了检测研究,吕强等利用高光谱成像技术对猕猴桃果实的微损伤进行识别。
本文通过统计分析我国猕猴桃果实的物理参数获得果实物理特性; 采用正交试验,以果实微损伤时的力学特性参数为评价指标研究了果实的损伤因素,为猕猴桃果实采摘机器人的末端执行器设计提供了理论依据。
1、 果实物理参数测定
1. 1 试验材料
试验材料为“海沃德”猕猴桃,2012 年 10 月 21 日采摘于西北农林科技大学眉县猕猴桃试验站,共计300 个果实,从中随机选取 115 个果实进行测量。
1. 2 测量方法
1. 2. 1 主要物理尺寸的测定
利用电子称( 精度 0. 01g) 称量果实质量 m。利用电子游标卡尺( 精度 0. 01mm) 测量猕猴桃果实的长L、宽 W、厚 T。每个尺寸从果实的 3 个不同方向测量 3次,取平均值作为测量结果,通过式( 1) 、( 2) 、( 3) 分别求取果实的算术平均值 Da、几何平均值 Dg 以及球度 Φ。有
1. 2. 2 静摩擦因数的确定
通过确定静摩擦因数可以确定抓持果实的最小夹持力,对分级机械和末端执行器设计具有指导意义。
为保证在测量过程中,果实不发生滚动和果实赤道部位与橡胶板表面可靠接触,文中将平均数目为 5 ~ 6个( 因果实大小而异) 的果实装进只有 5 个面的矩形盒( 去掉与橡胶表面相对的盒面,长 175mm,宽115mm,高 40mm) ,在保证果实之间无相对移动的情况下置于橡胶板表面; 然后,用万能试验机以 90mm/min 的速度将橡胶板的一头拉起使其倾斜,直到果实和盒子开始滑落时停止,量取橡胶板与水平面的夹角θ,由式( 4) 求取摩擦因数 υ。每组重复 3 次,共进行10 组试验,最终结果取平均值。有υ = tanθ ( 4)1. 2. 3 最小夹持力的确定。
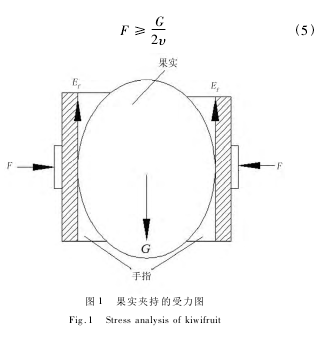
假设猕猴桃果实采用弧形面手指抓持,果实受重力 G,手指施加压力为 F,弧形面手指内附橡胶,与果实的摩擦系数为 υ,最大静摩擦力为 Ff。图 1 所示为果实夹持受力俯视图。由牛顿第一定律果实受力平衡条件,果实不滑落的临界条件为果实重力等于果实与手指间产生的最大静摩擦力。由此,最小夹持力 F为
2、 果实抓持损伤试验
2. 1 材料与设备
试验材料为成熟期“海沃德猕”猴桃果实,2012 年10 月 21 日( 收获当天) 采摘于西北农林科技大学眉县猕猴桃试验站,共计 300 个果实。从中随机选取 160个作为试验样本。
试验设备采用上海衡翼精密仪器有限公司生产的HY-0230 型微控电子万能试验机( 精度等级 0. 5 级、分辨力 1/250 000、精度±0. 5% 、速度可在 0. 001 ~500mm / min 内任意调节、力传感器量程为 0 ~ 100N) 。
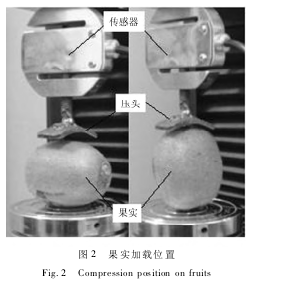
果实加载位置如图 2 所示。试验中,根据需要更换压头,针对现有的弧形面和棒形两种手指形式,自制弧形压头( 曲率半径 52mm) 代替凹型接触 ( 半径9. 5mm) 、棒形凸面型和球形压头接触。
2. 2 试验方法
试验采用正交试验法,从采摘的果实中随机选取160 个因素分为 16 组,选用 L16( 42×29) 正交表。
试验因素与水平选取: ①4 个压缩量。选取参考文献[6],何东健等对猕猴桃果实进行的压缩试验,指出 3mm 的压缩率不损伤果实,因此本文选取 2、3、4、5mm 4 个水平。②4 个加载速率。结合机器人手指闭合速率并参考文献[5],选择 30、60、90、120mm/min,属准静态加载。③两种加载位置。基础试验发现,猕猴桃果实纵向和横向存在各向异性,因此不同的加载位置对果实损伤存在影响。④两种压头材料。⑤两种压头类型。主要考虑了现有的末端执行器手指形状。
万能试验机自动记录样本压缩过程的加载力-位移曲线以及压缩数据和峰值力 Fmax,用 MatLab7. 14 软件对加载力-位移曲线积分即得到果实的力学特性参数压缩能 E。试验重复 10 次,最终结果取峰值力和压缩能的平均值。采用 SPSS19. 0 软件对试验结果进行方差分析,获得对果实损伤因素的显著性顺序。果实在压缩处理完成之后对压缩位置进行标记后置于室温 21℃下储藏,观察果实变化情况。
3、 结果与分析
3. 1 果实物理参数测定
“海沃德”猕猴桃物理参数统计结果,如表 1 所示。数据统计分析采用 SPSS19. 0 软件,从115 个水果的统计数据随机抽取 50 个样本数据进行统计分析。
由表 1 可知,果实平均质量、平均长度分别为 97. 41、64. 98mm,均小于 Seyed Mohammad Ali Razavi 的统计结果; 宽度和厚度分别为 52. 16mm 和 47. 86mm,均大于 Seyed Mohammad Ali Razavi 的统计结果。果实宽度和厚度方向极差分别为 11. 28mm 和 9. 14mm,相比长度方向 15. 50mm 变化小,有利于手指对果实大小的适应性,从而简化夹持机构。球度均值为 0. 84,大于Seyed Mohammad Ali Razavi 统计结果。 由此可以看出,我国“海沃德”品种形状规则,接近于球形,采摘末端执行器采用仿生圆弧面能保证夹持的稳定性和果实受力的均匀性,而且结构简单易于实现。果实与橡胶的摩擦因数在 0. 38 ~ 0. 51 之间,平均为 0. 44。若取果实平均质量 97. 41g,则采用两指夹持的方式,由式( 5) 可求得果实不滑落的最小夹持力 F 为 1. 08N。
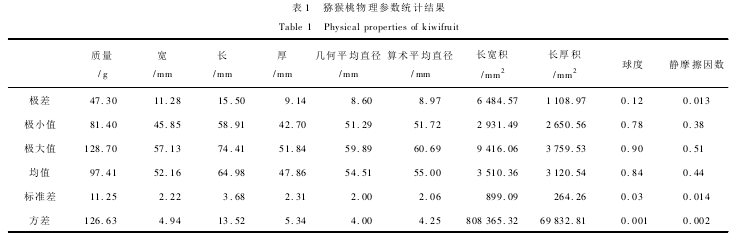
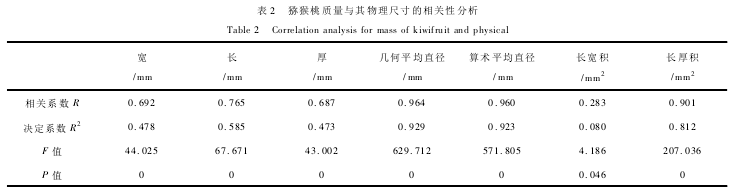
表 2 所示为猕猴桃质量与其物理参数相关性分析,显著水平 α=0. 05。由表 2 可知,果实质量与其几何平均直径、算术平均直径以及长厚积均存在显著的相关性,决定系数 R2均大于 0. 9,P = 0<α。果实的几何平均直径与质量的相关性最高,其相关系数 R =0. 964,长宽积与果实质量相关性最差,长、宽、厚 3 个单一尺寸与果实的质量存在相关性但相关系数较小,依据果实几何平均直径可对果实实现质量分级。
3. 2 果实抓持损伤试验
3. 2. 1 果实损伤分析
图 3 所示为压缩量 5mm( 加载力 20N) 、不锈钢球形压头的果实加载力-位移曲线。由图 3 可知加载力与位移近似呈线性关系,拟合直线决定系数 R2均大于0. 99。针对试验所选的压缩量,果实受压变形近似处于弹性变形阶段。
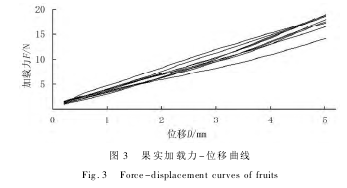
图 4 所示为压缩处理后不同储藏期果实品质变化对照。
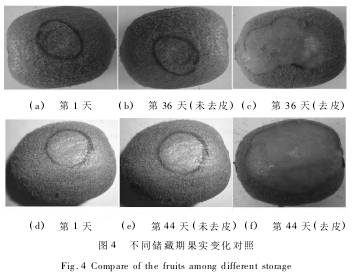
处理完成之后,第 1 天、36 天和 44 天时,果实未去皮前表面无损伤痕迹; 但对比图 4( c) 和 4( f) 可知,在储藏 44 天后,去皮后果实内部出现白色斑点,表现出明显果肉组织损伤。此时果实受力均值为 19. 5N。试验结果与 Harmandeep Jaura 研究发现猕猴桃果实微损伤会导致果实后期品质下降的观点一致,也同作者在陕西眉县齐峰果业公司的调研结果一致。由此可知,猕猴桃果实存在延迟损伤,即使是微损伤也影响其储藏期。
3. 2. 2 各因素对力学特性的影响
表 3 所示为峰值力方差分析结果。5 个因素均对峰值力产生显著影响,显著性水平 P 均小于 0. 05( α=0. 05) ,模型决定系数 R2为 0. 994,说明所选因素均为影响果实抓持损伤的影响因素。由统计量 F,FS>FT>FD>FM>FV可知,5 个因素对峰值力影响显著性依次是加载位置、压头类型、压缩量、压头材料、加载速率; 加载速率和压头材料对峰值力的影响较其他因素显著性较低。
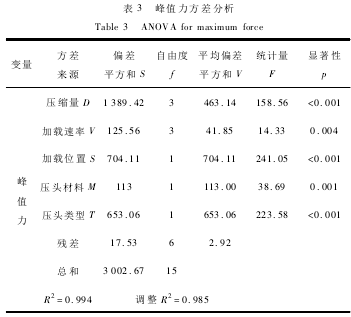
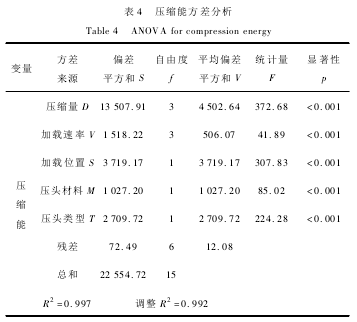
表 4 所示为压缩能方差分析结果。5 个因素均对压缩能产生显著影响,显著性水平 P 均小于 0. 05( α=0. 05) ,模型决定系数 R2为 0. 997,说明所选因素均为影响果实抓持损伤的影响因素。由统计量 F,FS>FT>FD>FM>FV可知,5 个因素对压缩能的影响显著性依次为压缩量、加载位置、压头类型、压头材料、加载速率;加载速率和压头材料对压缩能的影响较其他因素显著性较低。
对比 5 个损伤因素对峰值力和压缩能两个力学参数影响显著性顺序,居前三位的是压缩能、加载位置和压头类型,而加载速率和压头材料对两者的影响较其他因素相对较小; 相比刘继展等发现的加载位置对番茄果实的影响程度小而言,猕猴桃果实则相反。原因可能是猕猴桃果实的长度方向( 果蒂周围) 有着较高硬度的果芯,因此表现为明显的各向异性。峰值力受果实本身性质如果实曲率半径、成熟度等因素影响,文中主要考虑与末端执行器抓持相关的损伤因素,未考虑果实本身的性质。
加载速率对果实的力学特性影响较小与刘继展等研究结果一致,而压头材料相对偏低的原因可能是试验采用的橡胶材料弹性度较低。末端执行器的设计以压缩量为首要考虑因素,保证抓持的稳定性和果实的安全性,而手指内衬弹性材料可增加缓冲有利保证果实安全性。
4、 结论
1) 研究为采摘末端执行器机构设计和尺寸确定提供了理论依据。海沃德猕猴桃果实近似球形的果形宜于采用仿生弧形面进行夹持,其对果实形状的适应性好,同时受力均匀。而果实厚度方向极小的尺寸变化,采用厚度方向夹持可提高手指对果实大小的适应性。
2) 猕猴桃果实因前期的微损伤会在后期储藏期间加剧并表现出明显组织损伤,影响果实品质。
3) 压缩量、加载位置、压头类型、加载速率和压头材料均为果实抓持损伤的影响因素,而前 3 个因素对果实抓持损伤影响显著性高于后两个。末端执行器设计首要考虑压缩量,保证抓持的稳定性和果实安全性,而手指内衬弹性材料可增加缓冲有利保证果实安全性。果实成熟度、表面曲率、品种等与抓持损伤的关系以及微损伤检测方法需要进一步研究。





