����ͼ��ʶ�����ĵ���ƪ�������ƻ�ͼ��ʶ��ϵͳ���о�
����ժҪ��������������������ص�λ�����������飨�ѷ졢�Ӷ����Ĺ�������Ҫ�����˹����е��飬�������˹���ʽ���������ƻ������ײ����ķ�������ʱ�估��Ա��ȫ�Ե����⣬���˹���ʽ������ȡ�������������٣����������ƻ�����������ȷ����ԵĽϵ͡���ˣ����ij����о�������ļ����ͼ����ԭ���⣬������������س̶�������������������һ����ʵ������֤�����о�������ϵͳ���ȶ���������ԣ��ﵽ�淶��Ҫ��ļ�⾫ȷ�ȡ�
�����ؼ���:������;����״��ָ��;ͼ����;
����1 ǰ��
�������������ⵥλ�������ƻ�������ѷ졢�Ӷ�ʶ�������ø߿Ƽ����Զ�����ʽ���ձ������ô������ȹ��Ҷ���չ��һ�����Լ������Զ��������ѷ졢�Ӷ����ϵͳ����ˣ���ν�ͼ��������Ӧ���������ѷ졢�Ӷ�ʶ��ϵͳ��ͬʱ��ϼ���Ѹ�ٵ�����������������ټ����Ա���������ƻ�ʶ���ٶ��Ա����ʵ�ص�·���ƻ����鹤����Ϊ�˵�ǰ��·�����ƻ��о����ص㡣�ֽ����ά��·�Ĺ�������Ҫ�ڶ���������·ά����ԱΪ����·ʹ������������ڳ�����ϡ�ٻ�ҹ��ʱ�ν��м�⡣��ˣ�����ٶȷdz������ҵ�·�ϼ��dz�Σ�ա�ʹ���������ʽ����·���⣬����������Ч�ʣ�����·��ά�ɱ������г����б��ϡ�
����Ŀǰ��������ƻ���ʹ��ͼ������������Ҫ����������ѷ��ʶ���Ҽ����������ѷ졢�����ѷ졢���Ѽ���״�ѷ�ȡ���ȥͼ���������ѹ㷺Ӧ��������רҵ����ļ�ⷽ�档
����2 ϵͳ���
������ϵͳ�������������ƻ�������ͼ�������������ɼ����ڳ�����˼����ϵ�Line Scan CCD�����·���棬�������ͼ��洢�ڹ���վӲ���У��ٽ�ͼ�����������ɱ���д�������ƻ�ͼ������ʶ������״����������ֱ������һ��������·������ǰ�������㣬��ȡͼ���������ʱ���㷽ʽ��Ȼ�������������ͼ���������ķ������䴦����ͼ����2Dƽ��ͼ�������������Ϣ���ѷ졢�Ӷ����������ҽ�����������������������ͼ����ʶ��ϵͳ�Ĺ���������ͼ1��ʾ��
��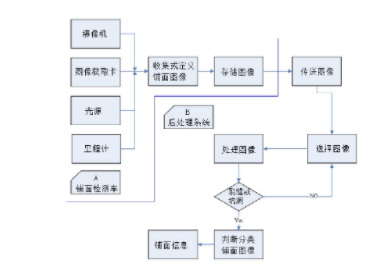
����ͼ1 ͼ������ʶ��ϵͳ����
������ϵͳͨ��ƽ����Ϣ�����أ���ͼ��������Ӧ���������ѷ졢�Ӷ������ֿף���ʶ�����������ṩ���������Ρ����ȡ����ȡ�������������س̶��Լ������������Ϣ��������PCIָ�����ֱ���Ϊ�ж�����Ʒ���Լ��˹������ϵIJ��㣬����Ѹ�ٻ�ø�·�ε�PCI���ֽ���������ƻ�������Ϊ�����ѷ졢�����ѷ졢�Ӷ������Ѽ���״�ѷ켸�֣���ֱ�����ݡ������ѷ쳤�ȡ��Ӷ�������ѷ�ƽ�����ȵ��������£�
����(1�������ѷ죺
����(1)ϸ����ͼ�����أ�Pixels���ۼӡ�
����(2)�ؽ���ͼ������������������֮��ľ��룬�ۼ����е���������Pixels�����ж����Ƿ��н������㣬�������Y��ij��ȡ�
����(2�������ѷ죺
����(1)ϸ����ͼ�����أ�Pixels���ۼӡ�
����(2)�ؽ���ͼ������������������֮��ľ��룬�ۼ����е���������Pixels�����ж����Ƿ��н������㣬�������X��ij��ȡ�
����(3���Ӷ���������2D��ͼ�������ʽ��ܼ���Ӷ��ƻ������
�����Ӷ����������Ӷ�����ķ�ʽ�����Ľ������ɷָ�ͼ�������ת�����Ĵ�ͼ��ֵ0��1������������Ϊ1���ƻ����֣����������ƻ���Pixelsֵ������������ÿӶ������һ���·����Ӷ���Ϊ��������״�ҿӶ��ܱ߶������ѵ����Σ��˹�����ʱ�ض���������������������ȷ�ʼ�����ͼ���������������Ա�������Ա��֪��β��������š�
����(4�����Ѽ���״�ѷ죺
��������������Ѽ���״�ѷ��ͼ����������������ƻ���Χ���������ƻ���ʽ�������ƻ����ݶ�Ϊ���������Լ������Է����ԣ���������ݡ������ѷ�����Ҿ��з����ԣ����������Ѽ���״�ѷ���ƻ����Ȳ������ص����Ŀ�������ص�������ȡ�ƻ���Χ�ڸ��ѷ������ƽ�����ȣ������ƽ�����Ƚ����ƻ��̶��б𣬽����ж������صȼ����ᡢ�С��أ�������������Ը������ѷ���з�����ʹ��IMAQ-Particle Analysis����������������ѷ�ƽ�����ȣ��ټ������п�����ƽ�����ȣ������ƻ����ѷ�ƽ�����ȡ�
����3 ϵͳ��֤
����3.1 ϵͳ����
����ͼ2Ϊ���ĵij���ϵͳ������ͼ������ʹ��Line Scan CCD����·�����㹤��������߶�Ϊ2�ף��Դ˵õ���������ƻ�ͼ�����Ϊ2048×1536(Pixels��������60��80����ʱ�������·���档
��
����ͼ2 ��������ͼ
����3.2 �����ƻ�ͼ���и�
�������Ķ�ȡԭʼͼ����Ƭ�ij���Ϊ�������غ��������ָ��X(Pixels����Ƭ���ȣ�Y(Pixels����Ƭ���ȡ���Ƭ�о����и�����N×N���ش�С�Ĵ�ͼ��Sub Image�������д�ͼ��ת��Ϊ������ʽ�洢��ͬʱ�����ж�ֵ���Ĺ�����
����3.3 �����ƻ�ͼ��ʶ��
��������ʹ�������ƻ�ͼ��ʶ��ϵͳ�����е���ѻҽ��ż�ֵ���أ�ѡ�����ͼ���и��Ҷ�ֵ���ָ��ʵļ���������������ļ�����������ƻ�ͼ�����壨�ѷ���Ӷ���������������������ѷ����ż�ֵ����ʶ�������ͼ����������벻������ͼ������������˲���Filter������ʴ��Erode������ɢ��Dilate���ȴ��������ʶ��ͼ����ʾ�ڻ����ϲ��Ҵ洢��ͼ3Ϊ�����ƻ�ʶ������
��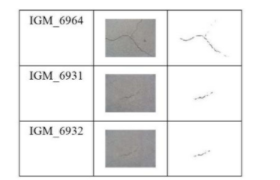
����ͼ3 �����ѷ������ƻ�ʶ����
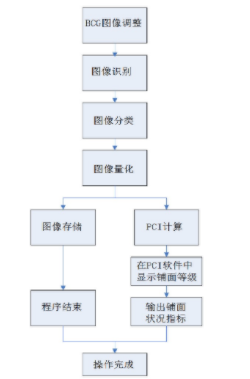
����3.4 �����ƻ�ͼ�����
�������Ľ�����ͼ��ʶ�������ִ�������ƻ�ͼ���������ڷ���Ĺ����У������ǩ�γɱ�ǩͼ��ͬʱ���������ǩ����������������ͳ�ƶ������ڳ����н����жϷ���Ϊ������ʽ�ֱ�Ϊ���ƻ���NO Cracking�����Ӷ���Pothole����Ϊ�����ͣ�Linear�����ӷ��ͣ�Joint����
����3.5 ϸ������
�����������ȶ�ȡ�ؽ���Ĵ�ͼ�������ͼ����ִ�и�ͼ���С��ѭ������������ִ�й����м���3×3��ʽ���˲����ܿ��ṩ��Ч��ͼ��ʶ�𣬲����м��ܼ��㣬���б��������洢���ݴ�����Buffer���У���ȡ�ݴ�����ͼ����ֵ����ת��������ͼ��ͼƬ�����ͨ��ϸ��������ʽ����ͼ��Ǽܣ�Skeleton����ʾ�������ѡ��Ϻɴ洢ϸ����������ƻ�ͼ��
����3.6 �����ƻ�ͼ����Ϣ
����(1�����Ƚ�ԭʼͼ��ת���ɾ�����ʽ��������ͼ�������R,G,B����ɫ������ֵ����ͬʱ��ֱ��ͼ����ʽ��ʾ��R,G,B�ֲ����Ρ�
����(2��ִ�лҽ�ͼ����Ϣ����
����(1)���Ƚ������ƻ�ͼ����ͼ����ʽת���ɾ�����ʽ��
����(2)����RGBת����ʽ��Y=0.922R+0.578G+0.114B��˼������ԭͼ������Ϊ��R,G,B�������ô�ת����ʽ��ȡ���ʵ���Yֵ���Â����������صĻҽ�ֵ��
����(3)���ҽ�ֵת����ͼ����ʽ��������ֱ��ͼ�ı�ʾ�������ƻ�ͼ��ҽ�ֵ�ֲ�������ʾ��������Ϊ�����ƻ�ͼ��ֲ�ͼ��
����4 ����
�������ĵ������ƻ�ͼ��ʶ��ϵͳ���о��������������ʽ��������ƻ�ͼ����з�����������������Ϊ������ȷ�ʣ���ά�������Ա��������ȫ����ϵͳ��100��Ϊ�������������㣬��������״��ָ�꣨PCI�����ȵ�·Ʒ�ʣ�Ѹ�ٻ�ø�·�ε����ֽ�������������ڽ���ͼ��ʶ������У�ʶ��Ľ������CCD�����������ĽǶȡ��߶ȡ���Դ�Լ����������ƻ�������Ӱ�졣��ˣ����ı�������������������ܼ�˵���ȷ�ȡ�
���������
����[1]����,֣����,�غ���,��.���Dz���������������ʱ������·��ṹ��ѧ����[J].���ϴ�ѧѧ��(��Ȼ��ѧ��) , 2016,(12).
����[2]С�ܣ����������ͻ�����̥�ӵ�ѹ���ֲ�ʵ��[J].ͬ�ô�ѧѧ��(��Ȼ��ѧ��)�� 2015.(11).
����[3]Ф��,���ܣ����������ڶ������Եĵ�������·������������ṹ�Ż�[J]���·, 2016,(6).
����[4]������,������,֣��,�ȿ��Ǻ�۸���ͬ�����Ե�����·�涯��ѧ����[J].�й���·ѧ��, 2012,(5).





