表6 二元Logistic回归分析变量参数编码
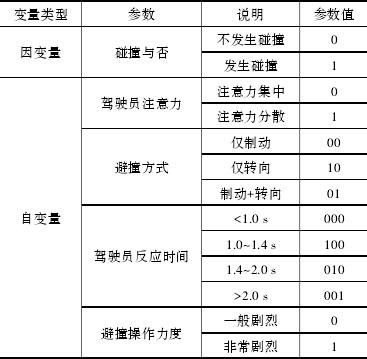
避撞方式与驾驶员反应时间均属于多分类变量,在进行二元Logistic回归分析时需要定义为哑变量。利用全变量进入法对变量进行回归建模,通过回归模型系数的综合检验结果表明,卡方值χ2为52.838,自由度df=7,概率p=0,模型中至少有1个自变量具有统计意义。采用统计量评价模型Hosmer-Lemeshow 的拟合优度,将216个样本数据按频率分为10组,构造卡方统计量,检验观测值与预测值是否存在显着差异。Hosmer-Leme show 统计量卡方值 χ2为 2.325,自由度 df=7,概率 p=0.940>0.05,表明在显着水平为0.05时事故发生概率的预测值与观测值不存在显着差异,即该模型的拟合效果较好。
表 7 为二元 Logistic 回归的分析结果。本文利用Wald统计值检验自变量的显着性,结果表明,避撞方式对于事故发生率的影响不显着;驾驶员注意力是否集中显着影响事故发生率,分心时的事故发生率是注意力集中时的3.359倍;驾驶员响应时间显着影响事故发生率,驾驶员反应时间大于2.0 s时,发生事故的可能性为响应时间小于1.0 s时的20.919倍;驾驶员避撞操作力度显着影响事故发生率,操作非常剧烈时的事故发生率是一般剧烈时的9.364倍。
表7 二元Logistic回归分析结果

4.3、建议
由上述分析可知,驾驶员注意力是否集中显着影响FCW的安全收益,因此FCW算法除了基于安全距离或安全时间的逻辑算法外,还应考虑驾驶员的状态(是否分心)。因驾驶员反应时间大于2.0 s时发生事故的可能性急剧增加,所以对于处于分心状态的驾驶员,FCW应提早报警。
对于注意力集中的驾驶员,FCW报警可以帮助驾驶员准确地感知当前危险状态,防止驾驶员因驾驶经验欠缺而将危险状态误判为安全状态。相对于分心驾驶员,FCW可对注意力集中的驾驶员稍晚报警,避免引起驾驶员反感而降低系统用户接受度。在本文设定的追尾危险工况下,驾驶员采用仅转向避撞的比例最低,虽然本文试验结果表明避撞方式对于事故发生率的影响不显着,但仅转向避撞的事故发生率低于其它避撞方式,这与Adams的研究[11]
相符。因此有必要开发避撞辅助系统,告知驾驶员最优避撞方式。值得注意的是,驾驶员响应操作非常剧烈时的事故发生率远高于一般剧烈时,本试验中驾驶员非常剧烈的避撞操作大多伴随着较长的反应时间和较小的TTC。在碰撞无法避免的紧急危险工况下,驾驶员往往没有足够的经验应对,不当的转向操作会使较大重叠率的碰撞变为小重叠率的偏置碰撞,不利于发挥车辆的碰撞安全性能。
制动同时转向的驾驶行为有可能导致车辆失稳,产生更为严重的后果。因此,在紧急危险工况下,碰撞无法避免的情况下,仅告知驾驶员最优避撞方式是不够的,需要避撞辅助系统介入车辆的横向和纵向控制,纠正驾驶员因慌乱产生的不当操作,从而避免事故的发生。
5、结束语
本文利用驾驶模拟器测试研究了特定追尾危险工况下驾驶员的响应特性。采用事故发生率作为安全收益评价指标,利用二元Logistic回归方法分析了驾驶员注意力状态、避撞方式、反应时间及避撞操作力度对前碰撞预警系统安全收益的影响。结果表明,驾驶员注意力是否集中显着影响FCW安全收益,FCW算法有必要考虑驾驶员的注意力状态(是否分心)。当驾驶员分心时,FCW应提早预警,保证驾驶员反应时间小于2.0 s,以降低事故发生的可能性。
本文得到的驾驶员避撞行为参数可视为中国驾驶员面对本文设定的追尾危险工况的真实反应,可以用于驾驶员制动和转向行为模型的建立,对于自动紧急制动系统及自动转向避撞系统的开发有一定的参考价值。





