
1、前言
腾空摆莲转体720度接马步技术的落地阶段属于由动到静的有限稳定平衡动作。单独的一个马步动作对于任何一个武术运动员都不属于难度动作。但在腾空摆莲720度转体接马步技术中,运动员由伴随着水平速度高速下落过程和身体绕纵轴的旋转来完成马步动作,整过程的由动到静是该技术连接难度动作的真正难点。
2、研究方法
2.1文献资料法
文献资料的查阅紧紧围绕研究主题,主要从三个方面入手:一是有关运动生物力学方面的教材、专著;二是有关武术套路难度动作方面的研究资料;三是通过网络检索,查阅与本研究相关的文献资料。
2.2专家访谈法
征求运动生物力学有关专家,确定试验的测试程序及实验数据的准确性,并指导现场测试。同时就腾空摆莲转体720°动作及技术细节咨询相关武术裁判员、高级教练员、优秀运动员。
2.3数理统计法
对所有获得的数据用Excel2003软件进行数理统计分析。
2.4对比分析法
同一实验测试对象的不同数据之间进行比较;理论上的技术与个体测试对象的实测技术进行比较。
2.5运动生物力学实验测试与分析法
采用三维高速摄像对测试对象所完成的腾空摆莲转体720°、540°接马步动作技术进行运动学的分析与测试,同时聘请武术国际级裁判与难度动作制订的评分专家,对测试对象所完成的难度动作进行现场打分,选取较好的数据(包括成功动作技术与未成功动作技术)为研究对象进行分析与研究。
3、落地稳定的理论分析
3.1静态马步的稳定性分析
马步属于下支撑静力性稳定平衡。下支撑的物体,当物体的倾斜角度较小时,它的重力作用线仍在支撑面内,且重心升高,重力矩能使物体恢复到原来位置,这种有限稳定平衡的能力用生物力学的术语叫稳度。当下支撑物体继续倾斜,重力作用线越出支撑面边界时,重力矩变成不稳定的因素,使平衡遭到重力矩的破坏。通过以上分析不难发现,人体的静止性马步动作属于下支撑的有限稳定平衡。
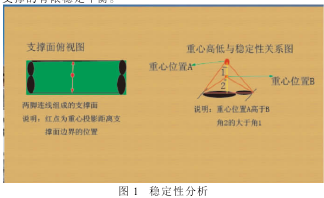
根据生物力学,处于下支撑有限稳定平衡状态的稳定性,取决于重心位置的高低、重力作用线到支撑面相应边界的距离、物体的重量和摩擦系数等。综合起来为平衡角、支撑面积和稳度系数。平衡角是稳度角在前后或左右的总和。支撑面是支撑点面积大小或多支撑点连线组成的面积大小。稳度系数是稳定力矩和翻到力矩的比值。在腾空摆莲720度转体接马步技术动作中,稳度系数中稳定力矩和翻到力矩为同一力矩即重力力矩。当重力线在支撑面内时,重力的力矩为稳定力矩;当重力线在支撑面积外时,重力矩为翻到力矩。人体的马步动作限制了支撑面的大小,换言之,支撑面的大小改变不大。因此,重心的高低及重心投影在支撑面内的位置直接影响到稳度角(见图1)的大小,稳度角越大越有利于运动员马步的稳定。
3.2动态马步形成的稳定性分析
动态马步形成的稳定性分析指运动员落地着地瞬间到成马步时刻的中间过程稳定性分析。腾空摆莲720度转体接马步技术动作属于斜抛运动,因此在落地之前有一定的水平速度。运动员两脚触地瞬间的运动学状态是:在垂直方向上有着较大的垂直速度;在水平方向上有着较小的水平速度;有一定的绕纵轴及额状轴旋转的角速度。外在受力状态是:水平方向的摩擦力;重力和垂直向上的支撑作用力及对纵轴、额状轴的力矩。对于上体的旋转惯性,运动员在落地瞬间及缓冲过程中,增大上肢的伸展幅度使转动惯量增大,减小上体尤其是髋关节的旋转角速度,最终在下落缓冲的过程中为零。根据静态马步的稳定性分析,前倒、前跳或后倒、后跳的本质使重力作用线超出了双脚的支撑面边界,使重力矩在支撑面的边界外成为倾倒力矩。如果重力的作用线在支撑面边界的脚尖前方,则运动员前倒;倘若运动员为了维持身体不致倒地,则反射性的做出前跳以使重心的作用线处在双脚连线的平面内。同理,如果重力的作用线在支撑面边界的脚跟的后方,则运动员后倒;倘若运动员为了维持身体不致倒地,则反射性的作出后跳。腾空摆莲720度转体接马步技术动作在两脚触地瞬间到缓冲完成阶段,技术的难点是运动员在高速下落过程中如何控制身体重心作用线处在两脚组成的平面内波动,从而使重力矩处于稳定力矩状态。
3.3理论上的落地技术
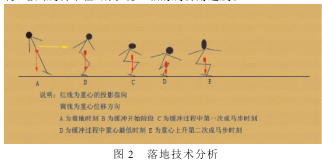
通过理论分析,本研究认为:在着地时刻,首先,保持身体与Z轴有一定的夹角即身体有一定程度的倾斜,倾斜方向与着地时刻身体重心的位移方向相反。倾斜角的大小恰好能使下落缓冲完成后成马步时刻身体重心处于支撑面的中心,且缓冲时间恰好使重心在水平方向的速度为零。其次,肩轴与地面平行,有利于落地时刻的左右方向的平衡。第三,增大下肢缓冲的时间。在下落过程中直接成马步,下落缓冲的时间短不利于稳定性,(见图2)在下落缓冲完成后,身体重心由最低点上升成马步有利于稳定(如图2E所示);第四,在两脚着地瞬间迅速伸展两臂,增大旋转半径,减小绕Z轴的旋转角速度。
4、实验对象的落地稳定性分析
表1中杨2、3、4的躯干与Z轴夹角在144度左右是有利于杨**稳定的。杨8、9前后倒地的可能的原因是杨**在缓冲完成后身体重心微升起过程中偏离两脚连线的支撑面。从整个研究对象的着地时躯干与Z轴夹角数据看,着地时躯干与Z轴夹角大有利于运动员落地的稳定性。
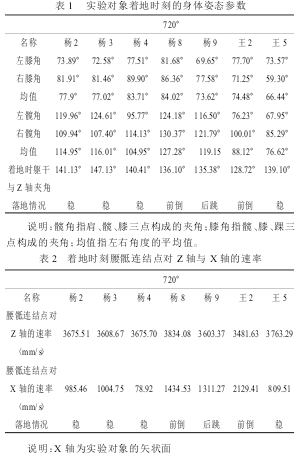
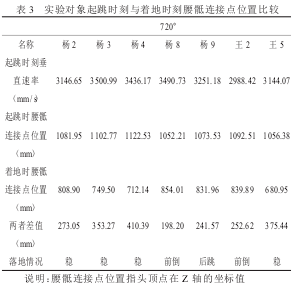
表2中,杨2、杨3、杨4的腰骶连结点对X轴的速率比杨8、杨9小,结合落地情况,说明杨**在落地时刻减小对X轴的速率是有利于其落地稳定。王2的腰骶连结点对X轴的速率远大于王5,是王**落地不稳的可能原因。从表中的整个数据变化趋势看,落地前对X轴的速率小有利于实验对象落地稳定。
表3中起跳时刻与着地时刻腰骶连接点差值,反映了相同马步动作时刻,落地缓冲的幅度不同,差值小说明落地时刻腰骶连接点距离地面高,则缓冲幅度大,反之则下。在其他因素相同的情况下,缓冲幅度大有利于落地稳定。实验对象着地后髋、膝缓冲过程如图3-图6所示:
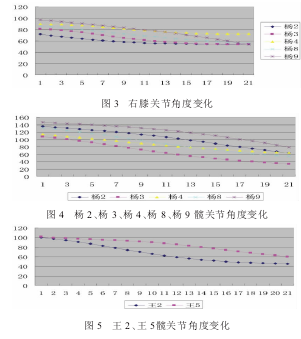
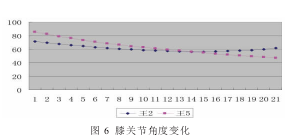
实验对象在着地缓冲过程中,主要由髋、膝、踝三大关节周围肌群做退让性收缩完成缓冲,从上图3中可以看出运动员在着地时髋、膝关节缓冲幅度。杨**的膝角、髋角缓冲幅度比王**大,主要原因是杨**起跳时刻与着地时刻的重心位置差比王**小。理论上讲,较大缓冲幅度有利于落地的稳定性,但在缓冲完成后成马步时刻,身体重心距离支撑面边界的位置直接决定着马步是否稳定。因此,建议实验对象在着地缓冲过程中,既要增大缓冲的幅度,又要注意控制缓冲过程中身体重心的位置。
由于实验不能确定的描述重心投影位置,本研究根据武术冠军赛录像中落地稳定性的运动员观察,从形态上对落地缓冲过程中控制重心在投影面内的建议如下:在缓冲过程中使臀部向脚跟的位置移动,膝关节前顶,两肩不超过膝关节与地面的垂面。
5、结论与建议
落地时刻的躯干角大小、腰骶连接点距离地面的高度、腰骶连接点对X轴的水平速度是影响落地稳定性的主要因素;落地时刻躯干角大、腰骶连接点距离地面的高、对X轴水平速度小有利于落地稳定性。实验对象的在着地时躯干与垂直的夹角大,有利于实验对象的稳定。落地成马步过程中,建议运动员在缓冲过程中使臀部向脚跟的位置移动,膝关节前顶,两肩不超过膝关节与地面的垂面。重心的高低对稳定性有一定的影响,建议运动员在成马步时刻通过“沉气”来稳固身体重心。
参考文献:
[1]吴忠贯译.生物力学[M].北京:人民体育出版社,1982.
[2]马和中.生物力学导论[M].北京:北京航空学院出版社,1986.
[3]体育学院通用教材.运动生物力学[M].北京:北京人民体育出版社,1996.
[4]吴忠贯译.生物力学[M].北京:人民体育出版社,1982.
[5]运动生物力学教材编写组.运动生物力学[M].北京:高等教育出版社,1988.
[6]朱照宣等.理论力学[M].北京:北京大学出版社,1982.





