摘要
目前能源危机和环境污染问题日益严重,国家和各地方政府相继出台各种政策以支持和鼓励新能源汽车发展,电动汽车也逐渐走进了人们的生活。电动汽车采用驱动电机装配机械式自动变速器的传动形式,能够降低整车对驱动电机和动力电池的要求;通过对整车质量和道路坡度进行辨识,得到修正电动汽车换挡规律的方法,提高电动汽车的动力性和经济性。
本文以电动汽车自动变速系统为研究平台,以提高汽车对行驶环境的自适应能力为研究目标,通过理论推导、仿真分析和试验验证相结合的手段,建立电动汽车动力传动系统数学模型,对整车动力性和经济性进行预测;设计基于运动学、动力学的汽车质量、路面坡度识别方法和基于双级非线性观测器的汽车质量、路面坡度辨识方法;分析行驶环境识别方法在电动汽车领域中的应用,主要研究了基于汽车质量、路面坡度的自动变速器换挡规律修正方法。同时,利用动力学分析软件 Matlab/Simulink 和多学科领域复杂系统建模仿真平台 AMESim,建立了涵盖电动汽车整车模型、主减速器模型、自动变速模型、驱动电机模型、驾驶员模型和行驶环境模型等在内的电动汽车综合仿真平台,对挡位决策优化前后的整车动力性能和续驶里程性能进行预测。通过 Matlab/Simulink 和Freescale CodeWarrior 设计编写控制策略,利用 Vector 公司 CANape 总线通讯测试工具进行实时监控,对整车质量和道路坡度辨识结果的准确性以及基于行驶环境自适应的电动汽车智能挡位决策方法的实际效果进行道路试验验证。
关键词:电动汽车;整车质量;道路坡度;换挡规律
Abstract
At present, the energy crisis and environmental pollution are becoming more and moreserious. The state and local governments have successively introduced various policies tosupport and encourage the development of new energy vehicles. Electric vehicles havegradually entered people's lives. The electric vehicle adopts the transmission form of the drivemotor assembled mechanical automatic transmission, which can reduce the requirements ofthe whole vehicle for the drive motor and the power battery; by identifying the vehicle qualityand the road gradient, the method for correcting the shifting law of the electric vehicle isobtained, and the electric motor is improved. The power and economy of the car.
This paper takes the electric vehicle automatic transmission system as the researchplatform, and improves the vehicle's self-adaptive ability to the driving environment. Basedon the combination of theoretical deduction, simulation analysis and experimental verification,the electric vehicle power transmission system simulation platform is established. To predictthe dynamics and economy of the vehicle; design the vehicle quality based on kinematics anddynamics, the road surface slope identification method and the vehicle quality and road gradeidentification method based on the two-stage nonlinear observer; In the field of electricvehicles, the correction method of automatic transmission shifting rules based on vehiclemass and road gradient is studied. At the same time, using dynamic analysis softwareMatlab/Simulink and multi-disciplinary complex system modeling and simulation platformAMESim, the vehicle model including electric vehicle, drive motor model, automatictransmission model, final drive model, driver model and driving environment wereestablished. The electric vehicle comprehensive simulation platform including the modelpredicts the vehicle's dynamic performance and driving range performance before and afterthe gear position decision optimization. The control strategy is designed and written byMatlab/Simulink and Freescale CodeWarrior, and the CANape bus communication test tool ofVector is used for real-time monitoring. The accuracy of vehicle quality and road slopeidentification result and electric motor based on driving environment are adaptive. The actualeffect of the car intelligent gear decision method is verified by road test.
Key words: electric vehicle; vehicle quality; road grade; shifting law
目 录
第 1 章 绪论.........................................................................................................1
1.1 研究背景与意义...................................................................................... 1
1.2 电动汽车发展现状.................................................................................. 2
1.2.1 国外发展现状................................................................................2
1.2.2 国内发展现状................................................................................3
1.3 汽车行驶环境识别方法与应用研究现状..............................................5
1.3.1 汽车整车质量和道路坡度辨识方法研究现状........................... 5
1.3.2 基于整车质量和道路坡度辨识的换挡规律修正方法研究现状6
1.4 本文研究内容.......................................................................................... 7
第 2 章 电动汽车动力传动系统建模分析........................................................9
2.1 电动汽车动力传动系统..........................................................................9
2.2 电动汽车行驶动力学分析....................................................................12
2.3 电动汽车动力传动系统建模................................................................13
2.3.1 整车动力学模型..........................................................................13
2.3.2 驱动电机模型..............................................................................15
2.3.3 AMT 换挡模型...............................................................................16
2.3.4 传动轴与主减速器模型..............................................................18
2.3.5 动力电池模型..............................................................................19
2.4 本章小结................................................................................................ 20
第 3 章 基于动力学和运动学的汽车质量和坡度识别方法研究................. 21
3.1 汽车纵向动力学分析............................................................................21
3.2 基于递归最小二乘法的整车质量识别方法........................................21
3.2.1 基于 Butter worth 方法的高通滤波器设计........................... 21
3.2.2 递归最小二乘法设计..................................................................22
3.3 基于动力学和运动学的坡度识别方法................................................23
3.3.1 基于动力学的坡度识别..............................................................23
3.3.2 基于运动学的道路坡度辨识......................................................24
3.3.3 基于动力学和运动学方法融合的坡度辨识..............................24
3.4 本章小结................................................................................................ 25
第 4 章 基于双级非线性观测器的整车质量与坡度识别方法研究............. 27
4.1 双级非线性观测器基本假设条件........................................................27
4.2 基于非线性估计器的整车质量与道路坡度识别方法....................... 28
4.2.1 基于一级估计器的整车质量识别..............................................28
4.2.2 基于二级估计器的道路坡度识别..............................................29
4.3 识别结果与验证....................................................................................30
4.4 本章小结................................................................................................ 31
第 5 章 基于整车质量和道路坡度识别的电动汽车换挡规律..................... 33
5.1 汽车换挡规律类型................................................................................33
5.2 电动汽车动力性与经济性换挡规律....................................................35
5.2.1 电动汽车动力性换挡规律..........................................................35
5.2.1 电动汽车经济性换挡规律..........................................................38
5.3 整车质量对换挡规律的修正................................................................39
5.4 道路坡度对换挡规律的修正......................................................................40
5.4.1 上坡时的换挡规律......................................................................40
5.4.2 下坡时的换挡规律......................................................................41
5.5 本章小结................................................................................................ 42
第 6 章 仿真分析与实车试验..........................................................................43
6.1 基于 AMESim 电动汽车动力传动系统模型搭建...................................43
6.1.1 行驶工况模块..............................................................................44
6.1.2 动力电池模块..............................................................................44
6.1.3 驱动电机模块..............................................................................45
6.1.4 AMT 模块....................................................................................... 45
6.1.5 驾驶员模块..................................................................................46
6.1.6 整车模块...................................................................................... 46
6.2 仿真结果分析........................................................................................ 48
6.2.1 动力性能仿真分析......................................................................48
6.2.2 经济性能仿真分析......................................................................48
6.3 电动汽车试验平台................................................................................49
6.3.1 试验车辆...................................................................................... 49
6.3.2 控制系统软硬件开发平台..........................................................49
6.4 动力传动系统台架平台........................................................................50
6.4.1 基于整车质量修正的换挡规律试验..........................................50
6.4.2 基于道路坡度修正的换挡规律试验..........................................51
6.5 本章小结................................................................................................ 52
第 7 章 总结与展望.......................................................................................... 53
7.1 全文总结................................................................................................ 53
7.2 不足与改进............................................................................................ 53
参考文献...............................................................................................................55
致谢.......................................................................................................................59
第 1 章 绪论
1.1 研究背景与意义
1886 年世界上第一辆汽车诞生,距今已经有 134 年的历史,汽车已经不仅仅是人类的一种交通工具,更是人们生活中必不可少的一部分。汽车工业为我国经济的快速发展提供了很大的动力,很多国外汽车品牌、中外合资汽车企业、自主汽车品牌迅速占据了中国汽车市场,汽车推进了社会经济的发展,但是,越来越多的问题出现在了人类的生活环境中,比如每年交通事故导致的伤亡人数直线上升,环境的污染与异常的天气,能源的危机等等问题。
目前,世界汽车保有量已经远超过 10 亿辆,美国能源部估计,到 2050 年将增长到35 亿辆[1],其中主要增幅来自发展中国家,像中国、印度等。据我国公安部交通管理局相关统计显示,2019 年我国机动车保有量已经达到了 3.48 亿辆,其中汽车保有量为 2.6亿辆,我国机动车和汽车保有量统计如图 1.1 所示。

图 1.1 我国机动车和汽车保有量统计
随着汽车保有量的不断增加,对空气质量造成的污染也日益增加,人们越来越多的开始关注健康、空气质量、雾霾,大气污染已然在我国各个城市造成了危机,而汽车排放出的汽车尾气更是最重要的元凶之一。低碳、节能、环保、绿色出行等名词出现在人们的面前,部分城市已经开始采用限制购买、限行的方式来控制汽车尾气造成的污染。
因此提倡低碳、节能环保、绿色的出行方式,而新能源汽车在未来的汽车工业发展中,无疑将会扮演至关重要的角色。相比于传统汽车,纯电动车运行效率高、噪音小、污染排放量少,属于一种新型能源汽车,有非常显着的节能减排效果,不仅可以降低环境污染,也可以解决当前能源危机[2]。
传统汽车动力能源为内燃机提供的热能,而电动车动力来源为电能,能源供给方式的改变不仅可以降低环境污染,也可以解决当前的能源危机。电动汽车采用电池和驱动电机作为动力之源,配备机械式自动变速器(AMT),增加了电动汽车经济性和动力性,同时电动车对动力电池与驱动电机的要求也有所降低,从而将电动汽车优越的整车性能更好地发挥出来。
针对于电动汽车行驶路况环境的信息辨识,比如坡度、弯度、载重量等辨识方法,并对这些方法在电动汽车领域应用进行研究。为我国自主开发电动汽车提供先进的、效率高、稳定性高的变速器系统,助力电动汽车的快速发展。
1.2 电动汽车发展现状
1.2.1 国外发展现状
日本是电动汽车发展最早的国家,也是世界上首先开始混动汽车制造的国家。由于日本的汽车制造技术先进,其生产的混动汽车具有油耗低、排量低等优点。日本制定了三年一度的低公害车开发普及行动计划,同时制定了安全与环保技术标准,推进了新一代低公害车辆的研发、基础设施的普及。此外,日本在本世纪初期先后出台了两份文件修订电动车免税政策,该制度规定为:减免第一次进行年检的电动车以及新车的汽车税,之后按照传统汽车税的一半征收汽车税。当前日本电动车市场上比较知名的品牌包括三菱和聆风[3]。
目前,美国拥有全球最大的电动汽车市场, 美国政府每年在电动车研发上投入的资金高达五十亿美元,这些研发资金主要用于电动车电池性能的研发、电动车充电装置的研发以及整车研发。和日本一样,在美国购置电动车也享受电动汽车税减免的优惠政策[4]。2018 年美国新能源汽车的年销售量接近 36.08 万辆,同比增长 81%。从动力结构看,纯电动汽车(BEV)市场份额占比最大,达 66%,插电式混合动力汽车(PHEV)市场占比为 34%。2017 年,纯电动汽车占比为 53%,插电式混合动力汽车占比为 47%。纯电动汽车市场份额有了明显的提升。2018 年全年电动车销量冠军为特斯拉 Model 3 14.6 万辆,占整个销量的近 40%。
欧洲各国为了鼓励电动汽车的开发,提供了多种优惠政策以及资金支持,这些资金主要用于企业纯电动车、混合电动车、油电混合电车的研发,主要研究项目包括动力电池组、充电装置、电控技术、驱动电机等,并重点支持研发电动汽车锂离子电池技术。
挪威、德国、英国、法国等国家,包括雪铁龙、沃尔沃、大众等着名汽车公司都开始开展插电混合电动车的研发。例如 宝马插电式混合动力 i8、纯电动跑车 i3, 大众插电式混合高尔夫TwinDriver 等。
2018 年,欧洲市场 HEV 销量为 60.62 万辆,同比增长 33.0%,与新能源(BEV+PHEV)同比例增长。欧洲主要发达经济体为了推动新能源汽车的发展,很多国家出台了相关的政策予以支持,反映在销量上,挪威的支持政策效果最为明显:不仅 7.27 万辆的销量超过德国,而且在挪威 2018 年度总计 14.79 万辆的新车销售中,占比已接近 50%。

图 1.2 2018 年欧洲新能源汽车销量前五国家
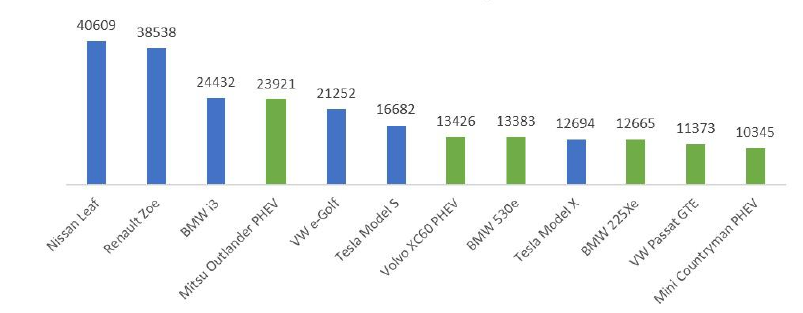
图 1.3 2018 年欧洲主要新能源车型及销量
有统计数据显示,2019 年,将有超过 20 个全新或升级的纯电动车型进入欧洲市场,这些重点车型包括:特斯拉 Model 3、日产 Leaf E-Plus、雷诺 Zoe 升级版、现代 Kona EV、捷豹 I-PACE、奔驰 EQC、奥迪 e-tron、大众 e-up、保时捷 Taycan 等。
1.2.2 国内发展现状
2013 年,我国出台了多条政策来鼓励和支持新能源汽车的开发和使用。例如降低电动汽车的充电电价、购买电动车给予一定的补贴、加大电动车的推广、消除电动车中的地方保护主义。国务院在 2013 年 1 月份出台了有关扶持新能源的政策,并且要求传统制造企业与新兴产业企业不断加强创新能力。政策指出,我国要加快产业结构转型,推进新兴产业的发展,鼓励更多的新能源汽车走向市场,特别是以下三种节能环保的汽车种类:以燃料电池作为能源的汽车、以电池作为能源的汽车、以电池或燃油作为能源的汽车。
2018 年 1-12 月纯电车型累计销量排行榜,北汽 EC 系列独得头筹,奇瑞 eQ 和比亚迪 e5 分列二三位。

图 1.4 2018 年中国纯电汽车销量排行榜
表 1.1 电动汽车参数

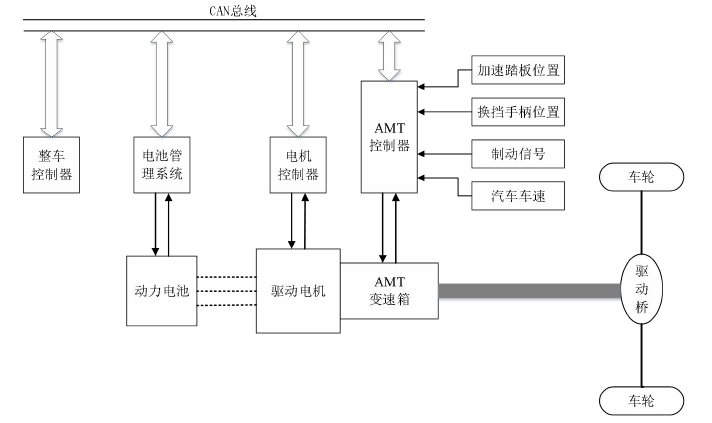
图 2.1 电动汽车动力传动系统
表 2.1 电池及管理系统

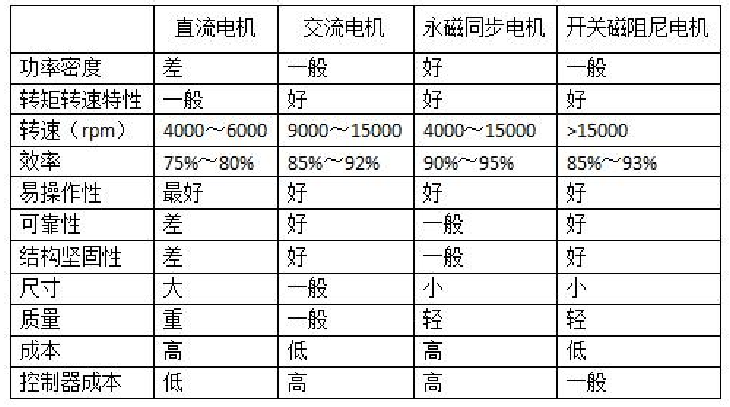
表 2.2 电机优缺点对比分析
…………由于本文篇幅较长,部分内容省略,详细全文见文末附件
第 7 章 总结与展望
7.1 全文总结
本文主要对纯电动物流车整车质量和道路坡度识别方法进行了研究,并分析了其AMT 的换挡控制技术,本研究开展的工作包括如下内容:
1)总结梳理了新能源汽车研发过程,介绍了当前国内外新能源汽车研发现状,得出在当前形势下开展纯电动车研发的必要性,同时对电动汽车的换挡规律现状进行了研究。
2)对纯电动汽车动力传动系统和行驶动力学特性进行了研究,建立了包括整车动力学模型、驱动电机模型、AMT 换挡模型、传动轴模型、主减速器模型以及动力电池模型等在内的纯电动汽车动力传动系统仿真平台。
3)建立了汽车的纵向动力学方程,研究了车辆动力学范围中如何估计路面坡度以及整车质量,提出了融合动力学和运动学理论在内的坡度估计方法,以高频信息提取为理论基础的整车质量估算方法,以及基于双级非线性观测器的整车质量和道路坡度辨识方法。
4)分别研究了自动变速器不同的换挡规律,得出在最佳经济性前提下的换挡规律以及在最佳动力学前提下的换挡规律,对换挡规律修正方法进行了介绍,给出了在考虑道路坡度以及整车质量前提下换挡规律的修正方法。
5)利用 AMESim 软件进行了整车仿真模型的构建。利用 AMESim/Simulink 这两种仿真软件研究了 AMT 换挡规律,仿真验证纯电动汽车的动力性、经济性换挡规律以及基于整车质量、道路坡度修正的换挡规律。
6)对汽车整车质量和道路坡度的识别结果进行了实车试验,验证了估计方法的准确性和合理性。利用插值法将整车质量和道路坡度变化对换挡规律进行修正,从而有效提升电动汽车的续驶里程等动力性与经济性指标。
7.2 不足与改进
对于整车质量和坡度的识别方法进一步完善,估计方法在进行了上述的研究后,还需要对基于道路坡度和整车质量电动汽车的换挡规律进行进一步的完善,为了达到该目的,还应做如下方面的工作:
(1)为了确定换挡规律在不同道路坡度和不同整车质量下都具有良好的适应性,需要进行更多的坡度和整车质量实验。
(2)本论文搭建的整车模型较为粗略,通过对 AMESim 和 Simulink 中相关参数的设定,增加整车模型计算结果的精确程度。
参考文献
[1] 王哲. 国内外新能源汽车发展现状及趋势[J]. 交通与港航, 2015, 2(6).
[2] 郭栋,张洪浩等.未来中国汽车类型发展预测及节能减排效益分析[J],系统工程理论与实践, 2016 , 36(6):1595-1599.
[3] 范志丹.国内外电动汽车发展现状综述[J].汽车维修,2018(06):2-3.
[4] 逯贯杰,吴晓宇,曾欢.国外电动汽车产业的发展及其对我国的启示[J].时代汽车,2017(06):33-34.
[5] 胡 堋 湫 , 谭 泽 富 , 邱 刚 , 王 欣 煜 , 邓 明 . 电 动 汽 车 发 展 综 述 [J]. 电 气 应用,2018,37(20):79-85.
[6] 刘 少 飞 , 黄 伟 , 左 毓 明 , 董 兴 宇 . 浅 析 我 国 汽 车 未 来 发 展 趋 势 [J]. 时 代 汽车,2018(10):42-43.
[7] 刘柏楠. 道路坡度及车辆质量自适应的自主驾驶车辆纵向速度控制研究[D]. 2015.
[8] Ardalan Vahidi, Anna Stafanopoulou, Hui Peng.. Recursive Least Squares withFor-getting for Online Estimation of Vehicle Mass and Road Grade Theory andExperiments[J] Vehicle System Dynamics, 2005,43(1):31-55.
[9] 杨志刚,曹长修,苏玉刚.动态识别道路坡度的多传感器信息融合方法[J]. 重庆交通学院学报,2002,21(2):97-102.
[10] 金辉,葛安林,秦贵和等.基于纵向动力学的坡道识别方法研究[J]. 机械工程学报,2002,38(1):79-86.
[11] 冉旭,李亮,赵洵,宋健,杨财,曹明伦.基于汽车动力学与加速度传感信息的纵向坡度实时识别算法[J].机械工程学报,2016,52(18):98-104.
[12] 戴卓,吴光强.基于车辆动力学的道路坡度与整车质量估计[J].汽车技术,2018(01):20-24.
[13] 葛安林.车辆自动变速理论与设计[M].北京:机械工业出版社,1995.
[14] Yang Gao, Yong Chen, Da guo Luo et al. Optimization study of automatic powershift schedule[C]. Mech Autom Control Eng MACE, 2011,5094-5097.
[15] 李浩,吴训成,张珏成.基于变载荷的最佳动力性AMT换挡规律修正[J].控制工程,2015,22(01):50-54.
[16] 罗俊勇.全电 AMT 坡道自适应换挡策略研究[D].中南林业科技大学,2016.吉林大学硕士学位论文56[17] 夏光,涂波涛,唐希雯,陈无畏.基于质量与坡度辨识的汽车自动变速器换挡控制研究[J].汽车工程,2018,40(03):305-312+341.
[18] 师帅,刘四海,吕二华,曲白雪.基于载荷和坡度的商用车AMT换挡规律修正方法[J].
传动技术,2018,32(02):18-20.
[19] 吴云兵.纯电动汽车两挡自动变速器壳体结构分析及改进[D]. 湖南大学.
[20] 张新磊.电动汽车总体设计及性能仿真优化[D].哈尔滨工业大学,2010.
[21] 雷雨龙,李永军.机械式自动变速器换档综合智能控制[J]. 汽车工程, 2001,23(5):311-314.
[22] 余盼霞. 机械自动变速器电动换挡执行机构动态特性分析[D]. 重庆大学, 2010.
[23] 周保华. 电动汽车传动系统参数设计及换挡控制研究[D]. 重庆大学, 2010.
[24] 余志生. 汽车理论[M].北京:机械工业出版社,2009.3.
[25] 郭建龙, 陈世元. 电动汽车驱动用电机的选择[J]. 汽车电器, 2007(1).
[26] 孙少华. 纯电动客车机械式自动变速器换挡综合控制技术研究[D]. 吉林大学,2014.
[27] 卢京民. 新能源汽车驾驶性研究[D]. 大连理工大学, 2013.
[28] 于 胜 武 . 汽 车 传 动 系 统 构 造 与 工 作 原 理 分 析 [J]. 产 业 与 科 技 论 坛 ,2012(23):53-54.
[29] 张万兴. 电动汽车动力电池剩余容量和续驶里程预测研究[D]. 合肥工业大学,2012.
[30] 杨德, 姚胜华, 黄兵锋, et al. 坡度和整车质量识别及其在 AMT 换挡规律中的应用[J]. 湖北汽车工业学院学报, 2019, 33(01):21-26.
[31] 李祥云.基于多维加速度传感器的车辆姿态测量系统研究与设计[D]. 2015.
[32] 褚文博,罗禹贡,罗剑,李克强.电驱动车辆的整车质量与路面坡度估计[J].清华大学学报(自然科学版),2014,54(06):724-728.
[33] 孟凡婧,金辉.自动变速车辆下坡换挡策略研究[J]. 汽车工程, 2018.
[34] 左思奇.基于卡曼滤波器和非线性观测器的车辆参数辨识研究[D].华中科技大学,2011.
[35] 杨秀建,李海青,高晋,朱若城.基于递推最小二乘法的半挂汽车列车结构参数估计[J].昆明理工大学学报(自然科学版),2014,39(03):43-49+60.
[36] 赵伟桦.纯电动汽车 AMT 换挡控制系统的研发[D]. 合肥工业大学, 2015.
[37] 周丹.机械式自动变速器换挡规律研究[D]. 武汉理工大学, 2011.
[38] 马国勇.电控机械式自动变速器(AMT)换挡规律的研究与仿真[D]. 2013.
[39] 张国胜, 牛秦玉, 方宗德, et al. Theory and Application Studies on Optimal Fuel Economy Shift Schedule%最佳燃油经济性换挡规律理论及其应用研究[J].中国机械工程, 2005, 016(005):446-449.
[40] 李正文.纯电动汽车两挡 AMT 换挡控制策略研究[D].重庆大学,2016.
[41] 何洪文, 余晓江, 孙逢春, et al. 电动汽车电机驱动系统动力特性分析%Studyon Power Performance of Traction Motor System for Electric Vehicle[J]. 中国电机工程学报, 2006, 026(006):136-140.
[42] 赵轩. 纯电动客车动力总成控制策略研究[D]. 长安大学, 2012.
[43] 李伟,阴晓峰,武小花.基于电机效率优化的纯电动汽车换挡规律[J].机械传动,2014,38(01):150-153.
[44] 陈飞,方志勤,崔刚.上坡工况换挡规律的应用研究[J].西华大学学报(自然科学版),2017,36(02):55-60+67.
[45] 李光宇. 整车质量与道路坡度识别及其对纯电动汽车换挡规律的影响[D].吉林大学,2016.
[46] 孙运玺. 基于 CAN 总线纯电动车主控制器节点设计及协议实现[D]. 吉林大学.
[47] 聂荣桂. 某微型纯电动汽车两挡 AMT 换挡控制及试验研究[D].湖南大学,2017.
[48] 廖林清, 张东方, 屈翔, et al. Simulation on the Start-up and Shift Process of Dual Clutch Transmission Vehicle Based on AMESim%基于 AMESim 的 DCT 车辆起步与换挡过程仿真分析[J]. 重庆理工大学学报(自然科学版), 2011, 025(001):5-11.
[49] 熊张林. 基于工况识别的混合动力汽车预测控制[D]. 重庆大学, 2014.
[50] 周云山,杨克锋.两挡纯电动汽车传动系换挡规律及速比优化研究[J]. 机械传动,2015, v.39;No.228(12):50-54+61.
[51] 江昊, 赵韩, 黄康, et al. 纯电动汽车经济性换挡规律仿真研究[J]. 汽车工程,2015(07):87-92.





