摘要
重型车辆在社会基础设施建设和经济发展中具有举足轻重的地位。由于其多变的使用场合与复杂的工作环境,重型车辆在坏路面上的动力性和好路面上的经济性之间的矛盾日益突出。加装轮毂液压混合动力系统的重型车辆,在坏路面时利用前轮的路面附着力进行液压辅助驱动,在好路面时使用机械后轮驱动,能够实现分时全驱,拥有良好的应用前景。
但由于重型车辆行驶工况的复杂性和驾驶员操作的不确定性,进行液压辅助驱动时往往会出现单侧车轮陷入泥潭或转向等工况,此时前轮两液压马达的需求转速转矩不同,而相同的转速转矩输出势必会造成轮胎磨损等寄生功率,甚至会出现车辆侧滑跑偏等危险工况,故基于前桥两液压马达的差速协调控制研究是完善轮毂液驱系统全工况适应性,提高其行驶安全性的关键。本文针对轮毂液驱重型车辆前桥差速协调控制问题,分别进行了基于路面附着系数辨识的工况适应层研究、基于节流阀设计和控制的执行子系统研究以及基于最优滑动率的逻辑门限差速控制策略研究,主要研究内容包括:
首先,针对本文的研究目标,提出了能够实现前桥两液压马达独立控制的轮毂液压混合动力系统构型方案,并分析其差速工作原理。根据系统构型方案分别进行机械系统和液压系统的建模分析,其中,七自由度车辆模型能够准确模拟车辆转向等工况下的动力学状态并提供所需的车辆运动学参数,Dugoff 轮胎模型的纵滑特性和侧偏特性为后文的仿真分析研究提供理论参考。
其次,车辆差速控制策略的实现离不开对工况信息的感知,针对路面附着系数辨识的工况适应层研究,开发了基于扩展卡尔曼滤波的路面附着系数估计算法;基于 TruckSim 重型车辆模型及工况模型和 Simulink 估计算法模型搭建联合仿真平台,然后分别在高附着系数路面、低附着系数路面、对开路面和对接路面进行仿真验证,结果显示开发的估计算法能够在合理误差范围内准确识别路面条件,且时效性较好。
再次,针对节流阀设计和控制的执行子系统研究,首先基于液压系统的工作压力和液压马达的基本参数进行节流阀的选型和基本结构参数的确定;然后基于 AMESim 软件搭建节流阀控制模型,通过分析其截面积影响因素,提取输入信号和输出流量关系的控制规则;最后基于 PID 反馈控制和前馈+反馈控制方法检验节流阀的响应效果,结果显示前馈+反馈控制方法对节流阀出油口流量具有更好的控制效果。 吉林大学硕士学位论文II最后,针对最优滑动率的逻辑门限差速控制策略研究,首先基于阿克曼转向模型分析转向工况下各车轮的目标转速,并以此作为轮毂马达的控制输入,并基于各路面条件下不同的最优滑动率范围作为逻辑门限值开发差速协调控制算法;其次搭建基于 AMESim 机械传动系统模型和 Simulink 车辆模型及差速控制策略模型的联合仿真平台;最后基于转向工况、直行工况下的对开路面和对接路面工况设置仿真验证实验,通过对车辆车速的跟随效果、轮速控制效果、滑动率控制效果和车辆行驶轨迹等效果的分析,证明了差速协调控制算法的准确性和有效性。
关键词:重型车辆,轮毂液驱系统,路面附着系数,差速协调控制
ABSTRACT
Research on Differential Coordinated Control of Hydraulic Hub-motor DriveSystem for Heavy Vehicle Front Axle 。
The heavy vehicle plays a pivotal role in social infrastructure construction and economicdevelopment. Due to its variable use occasions and complex working environment, thecontradiction between the power performance on bad roads and the economics of good roads ofheavy vehicle is increasingly prominent. The heavy vehicle equipped with a hub-motor hydraulichybrid system uses the road surface adhesion of front wheels for hydraulic auxiliary drivingwhen the road surface is bad, and mechanical rear wheels driving when the road surface is good,it can realize time-sharing full drive and has a good application prospect. However, because ofthe complexity of driving conditions of the heavy vehicle and the uncertainty of driver’soperation, the condition of one side wheel fall into the quagmire or steering often occur duringhydraulic auxiliary driving. At this time, the required speed and torque of the two hydraulicmotors of front wheels are different, and the output of the same speed and torque are bound tocause parasitic power such as tire wear, even dangerous conditions such as sideslip running.
Therefore, the research of differential coordinated control based on two hydraulic motors of thefront axle is the key to improve the adaptability of hydraulic hub-motor drive system under fulloperating conditions and improve its driving safety. In this paper, aiming at the problem ofdifferential coordinated control of hydraulic hub-motor heavy vehicle front axle, researchs on theworking condition adaptation layer based on the road adhesion coefficient identification, theimplementation subsystem based on the throttle valve design and control, and the logic thresholddifferential control strategy based on the optimal slip rate are carried out. The main content ofthis dissertation includes the following elements:
Firstly, according to the research objective of this paper, a configuration scheme of ahub-motor hydraulic hybrid system capable of controlling two hydraulic motors independentlyon the front axle is proposed, and its differential working principle is analyzed. Modeling andanalysis of mechanical system and hydraulic system were carried out respectively according tothe system configuration scheme. Among them, the seven-degree-of-freedom vehicle model can 吉林大学硕士学位论文IVaccurately simulate the dynamic state of the vehicle under conditions such as steering andprovide the required vehicle kinematic parameters. Longitudinal slip characteristics and sideslipcharacteristics of Dugoff tire model provides theoretical reference for the subsequent simulationanalysis research.
Secondly, the realization of vehicle differential control strategy is inseparable from theperception of working condition information. Aiming at the study of working conditionadaptation layer of pavement adhesion coefficient identification, a pavement adhesion coefficientestimation algorithm based on extended Kalman filter is developed. A joint simulation platformis built based on TruckSim heavy vehicle model, working condition model and Simulinkestimation algorithm model. Then simulation verification is conducted on high-adhesion roadsurface, low-adhesion road surface, split road surface and docking road surface respectively. Theresult shows that the developed estimation algorithm can accurately identify pavementconditions within a reasonable error range and has good timeliness.
Thirdly, for the research on the execution subsystem of throttle valve design and control, theselection of the throttle and the determination of the basic structural parameters are based on theworking pressure of the hydraulic system and the basic parameters of the hydraulic motor. Thena throttle valve control model is constructed based on the AMESim software, by analyzing theinfluence factors of its cross-sectional area, the control rules for the relationship between theinput signal and the output flow are extracted. Finally based on the PID feedback control andfeedforward + feedback control method to check the response effect of the throttle valve, theresults show that the feedforward + feedback control method has a better control effect on thethrottle valve outlet flow.
Finally, in order to study the logic threshold differential speed control strategy of optimalslip rate, the target speed of each wheel under steering condition is firstly analyzed based onackerman steering model, which is used as the control input of hydraulic motor, and thedifferential coordinated control algorithm is developed based on the different optimal sliding raterange under different road conditions as the logical threshold. Secondly a joint simulationplatform based on the AMESim mechanical transmission system model, Simulink vehicle modeland differential control strategy model is built. At last, the simulation experiment is set up basedon the turning condition and the straight running condition including split road surface anddocking road surface. Through the analysis of vehicle speed following effect, wheel speedcontrol effect, slip rate control effect and vehicle trajectory effect, the accuracy and effectivenessof the differential coordinated control algorithm is proved.
Key words: Heavy vehicle, Hydraulic hub-motor drive system, Pavement adhesion coefficient,Differential coordinated control
目 录
摘 要 ........................................................... I
ABSTRACT ................................................... III
目 录 ........................................................... I
第 1 章 绪论 ..................................................... 1
1.1 研究背景及意义 .......................................... 1
1.2 国内外研究现状 .......................................... 3
1.2.1 液压驱动系统研究 ................................... 3
1.2.2 差速协调控制研究 ................................... 6
1.3 本文技术路线与研究内容 .................................. 8
第 2 章 轮毂液驱系统建模 ........................................ 11
2.1 轮毂液驱系统方案 ....................................... 11
2.1.1 轮毂液驱系统构型 .................................. 11
2.1.2 轮毂液驱系统基本参数 .............................. 13
2.2 机械系统建模 ........................................... 14
2.2.1 七自由度车辆模型 .................................. 14
2.2.2 发动机模型 ........................................ 19
2.2.3 Dugoff 轮胎模型 .................................... 20
2.3 液压系统建模 ........................................... 23
2.3.1 液压变量泵模型 .................................... 23
2.3.2 液压马达模型 ...................................... 24
2.3.3 其他液压元件模型 .................................. 26
2.4 本章小结 ............................................... 27
第 3 章 基于扩展卡尔曼滤波的路面附着系数估计 .................... 29
3.1 路面附着系数估计器架构 ................................. 29
3.2 基于 EKF 的路面附着系数估计器设计 ....................... 30
3.2.1 扩展卡尔曼滤波理论及其算法 ........................ 30
3.2.2 基于 EKF 的路面附着系数估计算法 ................... 32
3.3 模型搭建及仿真验证 ..................................... 34
3.3.1 高附着系数路面仿真验证 ............................ 36
3.3.2 低附着系数路面仿真验证 ............................ 39
3.3.3 对开路面仿真验证 .................................. 40
3.3.4 对接路面仿真验证 .................................. 41
3.4 本章小结 ............................................... 42
第 4 章 节流阀设计及其控制研究 .................................. 45
4.1 节流阀设计 ............................................. 45
4.1.1 节流阀选型 ........................................ 45
4.1.2 节流阀尺寸参数设计 ................................ 46
4.2 节流阀控制模型研究 ..................................... 48
4.2.1 控制模型搭建 ...................................... 49
4.2.2 控制规则提取 ...................................... 50
4.3 节流阀流量控制 ......................................... 52
4.3.1 PID 反馈控制 ....................................... 53
4.3.2 前馈+反馈控制 ..................................... 56
4.4 本章小结 ............................................... 60
第 5 章 差速协调控制策略研究 .................................... 61
5.1 差速控制策略 ........................................... 61
5.1.1 阿克曼转向模型 .................................... 63
5.1.2 基于滑动率的差速控制策略 .......................... 66
5.2 联合仿真平台搭建与仿真测试 ............................. 68
5.2.1 转向工况仿真测试 .................................. 69
5.2.2 直行工况仿真测试 .................................. 73
5.3 本章小结 ............................................... 77
第 6 章 全文总结与研究展望 ...................................... 79
6.1 全文总结 ............................................... 79
6.2 研究展望 ............................................... 80
参考文献 ....................................................... 81
作者简介及研究成果 ............................................. 87
致谢 ........................................................... 89
第1章 绪论
1.1 研究背景及意义
重型车辆的市场活力与社会经济发展程度息息相关,随着我国社会经济的高速发展,促进了重型商用车辆黄金期的到来。一直以来,重型车辆在建筑、钢铁及煤炭等领域扮演着重要的角色,是我国基础设施建设和现代化发展中不可或缺的搬运工,随着市场需求的变化和国家经济结构的调整,目前重型商用车在公路运输、物流等行业的需求量也越来越大。
自 2018 年乘用车年销量出现 2.8%的负增长开始,其 2019 年的年销量继续下降,降幅约为 8%左右[1]。在汽车行业的寒冬之际,作为主要运载工具的中重型卡车却出现稳健发展的趋势,2016 年~2019 年(1 月-7 月)中重型卡车的年累计销量如图 1-1 所示[2]-[5](其中,2019 年可获得的销量仅统计至 7 月份)。由图可知,虽然 2018 年国内对中重型卡车的需求总量略有下降,但重型卡车的需求量仍然在稳步上升,达到 114.8 万辆,2019 年前 7 个月的重型卡车累计销量已达到 73.2 万辆,较 2018 年同期销量略有增加。
![]()
图 1-1 2016~2019 年中重卡年销量统计
随着中国中重型车辆市场规模的不断扩大,欧美等国家为了刺激本国经济,促进其商用车的发展,纷纷通过与国内车企合作或加大对中国商用车出口的方式侵蚀国内中重型车辆的市场份额,导致国际化竞争越来越激烈。基于此,国内主流的中重型车辆企业坚持自主研发路线,加强国际合作,积极进取、开拓创新,努力掌握核心技术,是使我国车辆行吉林大学硕士学位论文2业追赶甚至超越国外同行的重要途径。
传统重型车辆的特点是“功率大、排放差”,随着国家排放标准的愈加严苛,重型车辆在满足环保要求的情况下很难保证充足的动力,反之如是,导致其动力性和经济性的矛盾日益突出。重型车辆多用于建筑、煤炭等基础工业方面,行驶工况复杂多变,经常在崎岖山路、泥地、公路等道路交替行驶[6],路面附着系数和动力需求变化幅度很大,如何设计车辆的动力传动系统,能够同时兼顾其低附着路面的动力性和高附着路面的经济性,是对重型车辆研发人员提出的一大挑战。
机械全轮驱动能够充分利用车辆自重,提高其牵引性能,是一种解决重型车辆在低附着路面驱动力不足的有效途径。但重型车辆的全驱功能需要分动器来实现,该结构不仅增加了整车质量,而且导致机械传动机构复杂,底盘布置困难;此外当重型车辆行驶于高附着路面时,无法实现机械全驱系统的分时驱动,使车辆经济性变差,降低了牵引效率,同时也限制了该系统在重型车辆上的进一步应用。
液压技术的日趋成熟为其在重型车辆方面的应用提供了可能[7],近年来轮毂液压辅助驱动系统(以下简称“轮毂液驱系统”)逐渐成为混合动力重型车辆的一个新兴研究方向[8],其原理是通过液压马达适时地驱动非驱动轮行驶,达到短时辅助驱动的目的[9]。相比于传统重型车辆,轮毂液驱系统解决了其低附着路面的动力性和高附着路面的经济性之间的矛盾;相比于机械全轮驱动系统,轮毂液驱系统不需要分动器等复杂的机械构件,降低了开发布置难度,此外该系统还可以使发动机运行于最佳经济区,在保证车辆动力性的同时有效提高整车经济性。
轮毂液驱重型车辆的纵向动力学方向已经开展了较多工作[10]-[13],但没有对转向工况和不同路面条件下前轮左右液压马达的输出特性进行深入研究,考虑到重型车辆的工况复杂性和用户操作的不确定性,其侧向动力学的研究也同样重要。在转向工况下,由于两前轮的转弯半径不同,导致两轮的需求转速不同,而前轮两轮毂马达输出相同的转速势必会造成轮胎的滑转或拖滑,不仅会产生寄生功率造成轮胎的磨损,而且会导致车辆不能按照驾驶员的转向意愿正常行驶。在不同的路面条件下,各轮胎的附着系数不同,前轮相同的输出转矩会导致低附着路面的车轮打滑,降低车辆的通过性;此外由于车轮打滑导致其滑移率增加,使车辆的侧向力急剧减小进而使车辆抵抗侧滑的能力降低,使车辆的稳定性变差,甚至出现跑偏、侧滑甚至甩尾等危险工况,降低车辆的行驶安全性。
基于此,本文开展轮毂液驱重型车辆前桥差速协调控制研究,旨在解决轮毂液驱系统辅助驱动时,重型车辆在转向工况和不同路面条件下前桥左右车轮不能实现差速行驶的问题,完善了轮毂液驱系统的功能,提高了其工况适应性,具有一定的创新性和应用价值。
1.2 国内外研究现状
1.2.1 液压驱动系统研究
20 世纪 50 年代,英国最早推出采用静液驱动的拖拉机样机[14],拉开了液压驱动技术在车辆方面应用的序幕。由于静液驱动系统具有低速时传递扭矩大的优点,但同时还有传动效率低和工作噪声大的固有缺点,故其早期主要应用在对噪声要求不高且负荷较大的行走机械领域。继英国之后,德美也加大了静液驱动系统方面的研发投入,陆续推出其装备有静液驱动的拖拉机产品[15];国内方面亦积极响应,自 20 世纪 60 年代起,先后有三十多个单位开始研究静液驱动拖拉机,其中,以中国农业机械化研究院和北京内燃机总厂研制出的液压机械双功率流传动装置拖拉机为代表,提高了传动效率,减低了燃油消耗[16]。
随着机械加工工艺的进步,液压元件的精度有了显着提升,其泄露和噪声等方面的缺点得到了有效改善,液压元件品质的提高推动了液压驱动技术的发展。同时,受世界能源危机和环保法规的影响,德美等西方发达国家开始研究基于液压驱动技术的液压混合动力系统,并将其应用于商用车辆领域,以期改善商用车的燃油经济性和动力性。20 世纪 70年代以后,国内外学者围绕液压混合动力系统的构型、能量管理和动态协调等方面进行了大量的研究[17]-[23],为液压混合动力系统的商业化应用奠定了基础。
自 1985 年德国 MAN 公司推出最早的液压混合动力公交车样车 MAN Hydrobus 后[24],各国政府发现了该技术在未来商用车方面应用的诸多优势,并开始加大液压混合动力系统的研发力度。类比油电混合动力系统,液压混合动力系统分为串联式、并联式、混联式和轮毂驱动式[6],而各大车企也多基于这些构型对旗下的产品进行研发。2005 年,美国福特公司推出旗下首款串联式液压混合动力市内商用车[25],在保证动力需求的前提下提高了市区工况商用卡车的燃油经济性,此外,Innas 公司和 Altair 公司等也先后推出了旗下的串联式混合动力车辆[26][27]。在并联液压混合动力构型方面,德国博世力士乐开发的并联式液压制动能量回收系统(HRB,hydraulic regenerative braking system)在市政垃圾运输车辆领域得到了较好的应用[13],此外,美国 Lighting Hybrids 公司推出的并联式物流车[28]和美国 EPA与福特公司联合开发的并联式油液混动 SUV[29],均收到了良好的市场效果。
近几年国外针对液压混合动力系统的研究已经很成熟,且研究重点多集中于串联式和并联式,应用对象多为城市客车、物流车及工程机械等方面,而混合动力重型商用车多使用轮毂马达驱动构型。基于轮毂马达驱动式的液压混合动力系统研究多集中于欧洲,法国波克兰公司推出的 Hydraulic AddiDrive 液压轮毂马达辅助驱动系统[30],系统简图如图 1-2所示。该系统中的液压泵连接变速箱的动力输出端,为液压系统提供动力,两液压轮毂马达安装在非驱动轮中,作为辅助动力执行部件。该系统的优点是在液压辅助驱动时,可以充分利用前轮的附着力,使整车以全驱形式行驶,提高整车的动力性和通过性。而在好路面时,其轮毂液驱系统可以退出工作,仍然使用机械传动路径驱动车辆行驶,保证在该路面下高速行驶的燃油经济性。
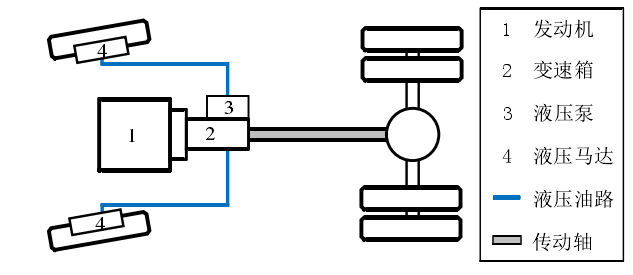
1-2 Hydraulic AddiDrive 液压辅助驱动系统
2009 年,法国波克兰公司与德国 MAN 公司合作,基于 Hydraulic AddiDrive 液压轮毂马达辅助驱动系统推出了 HydroDrive 轮毂液压混合动力商用车[31][32],如图 1-3 所示。由于液压元件重量轻和布置方便的优点,相比于机械全驱系统,整车重量得到了大幅度的减小。该车型的成功上市,是对轮毂液驱混合动力系统在重型商用车辆上能够发挥作用的肯定,增强了其他车企研发该系统的信心。

图 1-3 HydroDrive 轮毂液驱混动车

图 1-4 HydroAxle+液压混合动力车辆
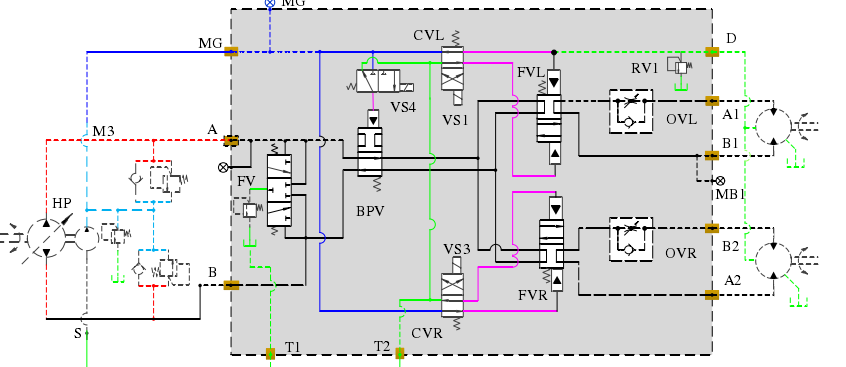
图 2-2 控制阀组结构原理

图 2-3 辅助驱动能量流
表 2-1 整车基本参数

…………由于本文篇幅较长,部分内容省略,详细全文见文末附件
第6章 全文总结与研究展望
6.1 全文总结
针对轮毂液驱重型车辆在转向工况和附着系数多变路面辅助行驶时,前桥左右车轮不能实现差速的问题,本文从工况适应层的路面附着系数估计、执行子系统和控制方法的设计,到基于最优滑动率的逻辑门限差速控制策略,系统地研究了轮毂液驱系统的差速协调控制方法。该研究完善了轮毂液驱系统的功能,提高了其在不同路面的工况适应性,对重型车辆的通过性和行驶安全性也有一定程度的提升,具有良好的应用前景。本文的主要研究成果如下:
(1) 基于本文的研究目标提出了能够实现轮间差速的液压混合动力方案,通过分析车辆转向工况下纵向、侧向和横摆三个方向的受力情况,在 Simulink 软件平台搭建“七自由度”车辆模型并对其进行仿真测试;为了方便工况适应层的研究,开展“Dugoff”轮胎模型的建模,并分析其纵滑特性和侧偏特性。为差速协调控制策略的使用和验证提供良好的模型基础。
(2) 车辆差速控制策略的实现离不开对工况信息的感知,根据车辆传感器信号开发基于扩展卡尔曼滤波的路面附着系数估计算法,并基于 TruckSim 和 Simulink 软件搭建联合仿真平台,然后分别在高附着系数路面、低附着系数路面、对开路面和对接路面进行仿真验证,结果显示开发的估计算法能够准确识别路面条件,且时效性较好。路面附着系数的准确估计是进行轮胎驱动力主动控制的前提。
(3) 在轮毂液驱混合动力方案中,能够实现前轮液压马达差速的控制元件是节流阀,作为本文研究的被控对象,其模型搭建和控制研究尤为重要。首先从节流阀的选型和参数设计入手,确定其主要的结构参数;其次基于搭建的节流阀控制模型,提取其控制信号和输出流量关系规则;最后基于 PID 反馈控制和前馈+反馈控制方法检验节流阀的响应效果,结果显示前馈+反馈控制方法对节流阀出油口流量具有更好的控制效果。
(4) 针对重型车辆前桥差速协调控制策略的研究目标,首先基于阿克曼转向模型分析转向工况下各车轮的目标转速作为轮毂马达的控制输入,并基于各路面条件下不同的最优滑动率范围作为逻辑门限值开发差速协调控制算法;其次搭建基于 AMESim 机械传动系统80模型和 Simulink 车辆模型及差速控制策略模型的联合仿真平台;最后基于转向工况、直行工况下的对开路面和对接路面工况设置仿真验证实验,通过对车辆车速的跟随效果、轮速控制效果、滑动率控制效果和车辆行驶轨迹等效果的分析,证明了差速协调控制算法的准确性和有效性。
6.2 研究展望
本文对加装轮毂液压混合动力系统重型车辆的前桥差速协调控制进行了系统的研究,但还存在一些不足之处:
(1) 在车辆建模时,文中仅基于车辆的纵向、侧向、横摆和四个车轮的转动这七个自由度进行分析,忽略了侧倾等因素的影响,降低了模型的精度,会对路面附着系数估计结果和差速控制策略效果产生一定的影响。在后续研究中,可以建立更加精确的车辆模型,从而指导设计更加精确高效的控制算法。
(2) 本文设计的液压系统均不考虑热力学的影响,但在液压系统实际工作过程中,液压油的温度与液压元件的工作效率和响应品质有很大的关系,故探究液压油温度的建模与控制是液压混合动力系统的一个研究重点。
(3) 由于新冠肺炎疫情和项目进度等原因,本文内容尚未进行 HIL 测试及实车装车验证,后续的工作重点是通过试验台架或实车试验对控制策略进行验证,并不断优化完善。
参考文献
[1] 郑雪芹.2019 年车市回顾及 2020 年展望[J].汽车纵横,2020(01):23-27.
[2] 习仲文.2016 年 1-12 月全国商用车市场销售统计图表[J].商用汽车,2017(Z1):140-143.
[3] 习仲文.2017 年 1—12 月全国商用车市场销售统计图表[J].商用汽车,2018(01):103-106.
[4] 习仲文.2018 年 1—12 月全国商用车市场销售统计图表[J].商用汽车,2019(01):132-135.
[5] 习仲文.2019 年 1—7 月全国商用车市场销售统计图表[J].商用汽车,2019(08):91-94.
[6] 李立鑫. 重型车辆轮毂液驱系统热力学建模及控制策略研究[D].吉林大学,2019.
[7] 单 增 海 , 丁 宏 刚 , 孙 建 华 等 . 液 压 辅 助 驱 动 系 统 及 工 程 机 械 车 辆 [P]. 江 苏 :
CN105329096A,2016-02-17.
[8] 曾小华,李文远,宋大凤等.重型商用车辆轮毂液驱系统的驱动特性[J].吉林大学学报(工学版),2017,47(04):1009-1016.
[9] 李相华. 重型牵引车液压轮毂马达系统辅助驱动与制动控制[D].长春:吉林大学,2015.
[10] 贺辉. 重型卡车轮毂马达液压驱动系统建模与控制策略研究[D].长春:吉林大学,2014.
[11] 李高志. 轮毂液驱重型车辆辅助驱动与再生制动控制算法研究 [D].长春:吉林大学,2016.
[12] 李文远. 轮毂液压混合动力车辆分层协调控制研究[D].吉林大学,2018.
[13] 李广含. 轮毂液压混合动力系统多模式能量管理与动态协调控制研究 [D].吉林大学,2019.
[14] Eyles L W. Hydrostatic Transmission for Agricultural and Industrial Vehicles[C]. Proc InstnMech Engrs,1969-1970.
[15] Updike K. International Harvester Tractors[M]. Paul MBI 2000:1955-1985.
[16] 边耀刚 . 行走机械液压驱动的发展 [R]. 中国农业机械化科学研究院,北京:
1981,(03):1-7.
[17] Casoli P, Gambarotta A, Pompini N, et al. Coupling excavator hydraulic system and internalcombustion engine models for the real-time simulation[J]. Control Engineering Practice,2015, 41: 26-37.
[18] 姜继海.二次调节压力耦联静液传动技术[M]. 北京:机械工业出版社,2012. 吉林大学硕士学位论文82[19] Buchwald P, Christensen G, Larsen H, et al. Improvement of Citybus Fuel Economy Using aHydraulic Hybrid Propulsion System - A Theoretical and Experimental Study[J]. Society ofAutomotive Engineers Preprint, 1979.
[20] Pourmovahed A, Beachley N H, Fronczak F J. Modeling of a Hydraulic EnergyRegeneration System: Part I—Analytical Treatment[J]. Journal of Dynamic SystemsMeasurement & Control, 1992, 114(114):160-165.
[21] Beachley N H, Fronczak F J. Advances in Accumulator Car Design[C]// Sae FutureTransportation Technology Conference & Exposition. 1997.
[22] Bravo R R S, De Negri V J, Oliveira A A M. Design and analysis of a parallelhydraulic–pneumatic regenerative braking system for heavy-duty hybrid vehicles[J].
Applied Energy, 2018, 225: 60-77.
[23] Chen J S. Energy efficiency comparison between hydraulic hybrid and hybrid electricvehicles[J]. Energies, 2015, 8(6): 4697-4723.
[24] Mark ED. The evaluation and analysis of a power split hydraulic hybrid drivetrain [D].
Thesis on Master of University of Missouri-Columbia. 2003:23-26.
[25] Chriag. Ford to Build 60-mpg F150[EB/OL].(2006-07-19) [2008-7-9]. http://www.
fordmuscle.com/blog/ford-to-build-60-mpg-f150/112114.
[26] Dipl.-Ing. G. E. M. Vael, Dr.-Ing. P. A. J. Achten. IHT controlled serial hydraulic hybridpassenger cars[C]. Aachen , Nordrhein-Westfalen : 7th International Fluid PowerConference,2010.
[27] BU Solutions [J/OL]. 2012. http://www.altairbusolutions.com/.
[28] 卡 车 之 家 . 宣 称 节 油 40% 闪 电 液 压 混 动 技 术 再 次 升 级 [EB/OL].http://www.360che.com/tech/150212/38040.html[29] 叶永盛. 并联式液压混合动力车辆参数优化及控制策略研究[D].杭州:浙江大学,2014.
[30] Poclain Hydraulic :World Leading Specialist In Hydrostatic Transmission [EB/OL].http://www.poclain-hydraulics.com/en/systems/trucks.
[31] 罗晓岚. 采用静液压前桥驱动技术的 MAN TGS35.440 8X6 自卸车[J/OL].商用汽车杂志,[2011-7-5] http://www.magcv.com/html/Model/Newcar/1037.html吉林大学硕士学位论文84[47] 张庆永, 常思勤. 液驱混合动力车辆液压系统设计及性能分析[J]. 拖拉机与农用运输车, 2010 (1): 62-65.
[48] Sakai S, Sado H, Hori Y. Motion control in an electric vehicle with four independentlydriven in-wheel motors[J]. IEEE/ASME Transactions on Mechatronics, 1999,4(1):9-16.
[49] Lee J S, Ryoo Y J, Lim Y C, et al. A neural network model of electric differential system forelectric vehicle[C]. Industrial Electronics Society, 2000, (1):83-88.
[50] Perez-Pinal FJ, Cervantes I, Emadi A. Stability of an Electric Differential for TractionApplications[J]. IEEE Transactions on Vehicular Technology, 2009(9), 58(7): 3224–3233.
[51] Tabbache B, Kheloui A, Benbouzid M E H. An Adaptive Electric Differential for ElectricVehicles Motion Stabilization[J]. IEEE Transactions on Vehicular Technology, 2011,60(1):104-110.
[52] Sekour M, Hartani K, Draou A, et al. Sensorless Fuzzy Direct Torque Control for HighPerformance Electric Vehicle with Four In-Wheel Motors[J]. Journal of ElectricalEngineering & Technology, 2013, 8(3):530-543.
[53] Ozkop E, Altas I H, Okumus H I, et al. A fuzzy logic sliding mode controlled electronicdifferential for a direct wheel drive EV[J]. International Journal of Electronics, 2015,102(11):1919-1942.
[54] 卓桂荣,余卓平,陈惠,陈辛波.4WD 电动汽车转速闭环控制[J].汽车技术,2004(12):18-22.
[55] Tao G, Ma Z, Zhou L, et al. A novel driving and control system for direct-wheel-drivenelectric vehicle[C]. Electromagnetic Launch Technology, 2005, (41):514-517.
[56] Yang Y, Xing X. Design of electric differential system for an electric vehicle with dualwheel motors[C]. Decision and Control, 2008, (16):4414-4419.
[57] 王强. 基于横摆力矩和变滑转率联合控制的电子差速控制系统研究[D].浙江大学,2011.
[58] 吴道龙,杨林,金洋.基于二次转矩分配的电子差速系统设计[J].汽车技术,2017(02):51-56.
[59] 于宏啸. 基于状态估计的智能车辆碰撞避免研究[D].北京工业大学,2015.
[60] H. Dugoff, P. S. Fancher, L. Segel. An analysis of tire traction properties and their in?uenceon vehicle dynamic performance. SAE Transactions, 1970, 79: 341-366.
[61] 戴一凡. 分布式电驱动车辆纵横向运动综合控制[D].清华大学,2013. [32] MAN HydroDrive |MAN Truck International: Technology & competence.
http://www.mantruckandbus.com/com/en/innovation___competence/applied_safety/man_hydrodrive_/MAN_HydroDrive_.html[33] GINAF : GINAF HydroAxle+: Extra Power! [EB/OL]. http://www.ginaf.nl/index.
php?id=293&L=%271.
[34] 汉 诺 威 车 展 : 博 世 展 示 卡 车 技 术 发 展 趋 势 [J/OL]. 卡 车 之 家 , [2012-09-26].
http://blog.sina.com.cn/s/blog_607c909d0102ea6h.html[35] 薛文祥. 4X2 轻松变成 4X4 雷诺 OptiTrack IAA 首发[J/OL].汽车之家,[2010-09-25].
http://www.360che.com/tech/100925/11426.html[36] 徐耀挺. 复合再生制动系统的制动效能稳定和能量高效回收的研究[D]. 浙江工业大学,2012.
[37] 王瑞武. 我国混合动力城市客车的开发与应用[J]. 人民公交, 2008(1):17-20.
[38] 陈杰. 交大神舟,液压混合动力公交车“专家”[J]. 人民公交, 2008(2):16-17.
[39] 搜狐网 . 我国液压混合动力节能技术实现重大突破 [EB/OL].http://www.sohu.com/a/106045280_455713[40] 潘霜威. 液压混合动力自卸车顶升节能控制系统研究[D]. 杭州:浙江大学,2018.
[41] Hui S, Junqing J. Research on the system configuration and energy control strategy forparallel hydraulic hybrid loader[J]. Automation in Construction, 2010, 19(2): 213-220.
[42] 王昕, 姜继海. 轮边驱动液压混合动力车辆再生制动控制策略[J]. 吉林大学学报: 工学版, 2009 (6): 1544-1549.
[43] 杜玖玉, 王贺武, 黄海燕. 基于规则的混联式混合动力系统控制策略[J]. 农业工程学报,2012 (S1): 152-157.
[44] 杜玖玉, 王贺武, 黄海燕. 混联式液压混合动力系统储能元件参数优化[J]. 农业工程学报, 2012, 28(6): 39-43.
[45] 董晗, 刘昕晖, 王昕, 等. 并联式液压混合动力系统中蓄能器各主要参数对系统性能的影响[J]. 吉林大学学报 (工学版), 2015 (2): 420-428.
[46] 肖清, 王庆丰, 张彦廷, 等. 液压挖掘机混合动力系统建模及控制策略研究[J]. 浙江大学学报 (工学版), 2007, 41(3): 480-483.
[62] 时艳茹. 基于 UKF 滤波的汽车纵向和侧向速度估计算法研究[D].吉林大学,2011.
[63] 曾小华,刘持林,李文远,宋大凤,李立鑫,陈存福.液压混动系统泵排量控制研究[J].湖南大学学报(自然科学版),2019,46(04):25-33.
[64] 张航星,路永婕,张俊宁.基于非线性车辆模型的行驶状态与路面附着系数估计[J/OL].石家庄铁道大学学报(自然科学版):1-12[2020-03-14].https://doi.org/10.13319/j.cnki.sjztddxxbzrb.20180626001.
[65] L. M. Paz, J. D. Tard?s and J. Neira, "Divide and Conquer: EKF SLAM in $O(n)$," inIEEE Transactions on Robotics, vol. 24, no. 5, pp. 1107-1120, Oct. 2008.
[66] 杨琨明. 基于自适应卡尔曼滤波的轮毂电机驱动车辆状态估计研究[D].南昌大学,2018.
[67] 武钟财. 基于扩展卡尔曼滤波的路面附着系数估计算法研究[D].吉林大学,2008.
[68] M. Bloesch, S. Omari, M. Hutter and R. Siegwart, "Robust visual inertial odometry using adirect EKF-based approach," 2015 IEEE/RSJ International Conference on Intelligent Robotsand Systems (IROS), Hamburg, 2015, pp. 298-304.
[69] H. Guo, H. Chen, F. Xu, F. Wang and G. Lu, "Implementation of EKF for Vehicle VelocitiesEstimation on FPGA," in IEEE Transactions on Industrial Electronics, vol. 60, no. 9, pp.
3823-3835, Sept. 2013.
[70] M. Charkhgard and M. Farrokhi, "State-of-Charge Estimation for Lithium-Ion BatteriesUsing Neural Networks and EKF," in IEEE Transactions on Industrial Electronics, vol. 57,no. 12, pp. 4178-4187, Dec. 2010.
[71] 贾恺.基于电液比例阀控制的液压系统的研究[J].机械管理开发,2018,33(12):99-100.
[72] 温彬,黄国焘,张立龙,王艳刚.基于 AMESim 的电液比例节流阀建模与仿真[J].当代农机,2019(01):72-74.
[73] Yongfu, Li, Bin, et al. Extended state observer–based intelligent double integral slidingmode control of electronic throttle valve:[J]. Advances in Mechanical Engineering, 2017.
[74] 陈晋市,刘昕晖,元万荣,王同建,赵锋.典型液压节流阀口的动态特性[J].西南交通大学学报,2012,47(02):325-332.
[75] Shah P , Agashe S . Review of fractional PID controller[J]. Mechatronics, 2016, 38:29-41.
[76] M Burckhardt, Fahrwerktechnik. Radschlupf-Regelsysteme [M]. Wrzburg: Vogel 吉林大学硕士学位论文86Verlag,1993.
[77] Merve Y?ld?r?m, Eyyüp ?ksüztepe, Tanyeri B , et al. Electronic differential system for anelectric vehicle with in-wheel motor[C]// International Conference on Electrical &Electronics Engineering. IEEE, 2016.
[78] 付贝贝. 四轮独立液压传动越野车行走系统研究[D].吉林大学,2017.
[79] 陈世虎. 轮毂电机驱动电动汽车差速及滑移率控制研究[D].重庆大学,2018.





