引言
马铃薯作为一种根茎类作物,其薯块埋于土层之下,人工收获费时费力。目前,市场上销售的马铃薯收获机以小型机为主,能够实现将薯块挖掘出土的功能。近几年,联合马铃薯收获机的研究取得了较大进展,但我国的地块相对较小,大型联合马铃薯收获机的普及尚需时日,小型马铃薯收获机将会在很长的时间里作为主力机型。采用小型马铃薯收获机作业实现将马铃薯挖掘出土在地面平铺,再通过人工捡拾,生产效率较低,人工捡拾工作量较大,劳动强度较高; 而且在收获下一垄时如果前一垄没有捡拾完毕,还容易造成对已挖掘出土马铃薯的碾压。
为此,在小型马铃薯收获机的基础上进行技术改进,通过加长输送部分,在马铃薯收获机的后方设计一个临时薯块收集器,实现马铃薯挖掘出土后的定向堆放功能。由此实现马铃薯的连续挖掘收获、收集薯块间隔堆放,在很大程度上降低了人工捡拾的工作量,同时避免了拖拉机收获后碾压伤薯。该定向堆放装置能起到暂时收集定向排放的作用,较大程度地提高了马铃薯的收获效率,减轻收获的劳动强度,节约了人工成本,很适合在国内进行广泛的应用推广。本文主要介绍定向堆放装置的工作原理、结构和开启方式。
1 工作原理
在小型马铃薯挖掘机的基础上,通过加长输送链使得机器后部有足够的空间设计一个收集箱用来临时收集薯块,随着输送链的加长,使得薯土分离更彻底,明薯率更高。其总体结构图如图 1 所示。【图1.略】
这款马铃薯收获机适合杀秧后收获,如果是沙质土壤,收获效果更好。在拖拉机的牵引下,通过挖掘铲将薯块挖掘出土,随着拖拉机的前行和链杆输送系统的转动,将马铃薯及土块向上传输。为了防止马铃薯往下滚落到传输链上,设计有挡块; 为了薯土分离更彻底,传输链下面设有抖动装置。薯块往后传输落入收集箱,当收集一定的薯块后,可以根据行程、时间、质量等因素来判断是否将收集箱开启,将薯块快速地往左、往右或者后部堆放。该机器了实现连续挖掘工作及集薯箱的间歇排放,排放和收获过程不相互干扰,且集薯箱的关闭不会产生卡死、伤薯的情况。
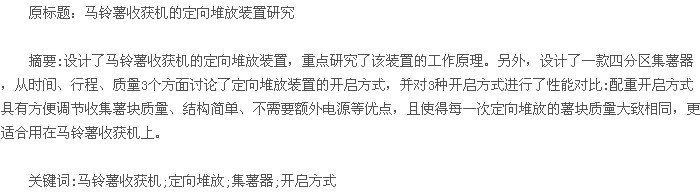
课题组设计了一款四分区收集箱,如图 2 所示。【图2】
该集薯器中间轴部设计有棘轮机构,只能单向旋转,挡板作为旋转开关,中间轴的旋转靠收集薯块的重力来完成,不需要外力。当挡板开启瞬间,在临时集薯区薯块重力的作用下,中间轴沿着逆时针旋转,薯块快速从下面的排薯区排出; 同时挡板恢复原位,使中间轴只能旋转 90°后停止旋转,下一分区开始收集薯块。该设计能够在不需外力的作用下实现薯块排放和收集相对分离,在不影响收获的同时,将收集的薯块向一侧排出,实现了机器的连续收获和间歇定向堆放。
2 控制开启方法的研究
定向堆放装置的开启方式有多种,主要从时间、行程、质量 3 个方面进行讨论。
2. 1 通过时间控制定向堆放装置的开启
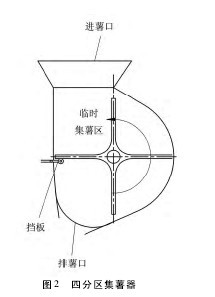
通过时间控制定向堆放装置的原理图如图 3 所示。定时开启装置通过凸轮结构控制挡板的伸缩,来实现薯块的收集和排放,如图 4 所示。【图3.图4略】
图上所对应位置为临时集薯区收集薯块的位置。
当达到设定的时间时,凸轮下面的步进电机旋转 1圈,然后停止,从而在收集薯块重力的作用下,实现将收集的薯块从排薯区排除,下一分区转到临时集薯区位置开始下一分区的收集。
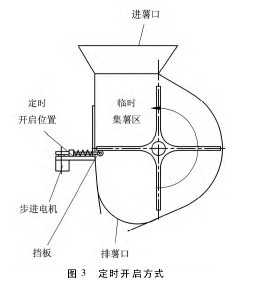
2. 2 通过行程控制定向堆放装置的开启
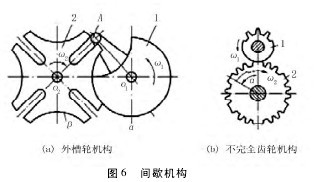
通过地轮的行程控制堆放装置的开启和关闭,如图 5 所示。其可以利用不完全齿轮或者外槽轮间歇机构( 见图 6) 作为触发开关,控制步进电机旋转一圈,实现根据行程控制定向堆放装置的开启与关闭。
除此之外,也可以考虑采用圆柱分度凸轮机构和弧面分度凸轮机构等间歇机构。如果不采用步进电机,也可以直接通过纯机械式间歇机构实现根据行程控制堆放装置的开启与关闭,开启装置的机构原理图如图 7 所示。【图5-7】
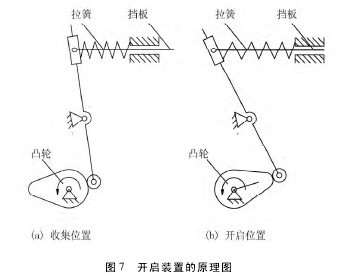
地轮通过链传动将运动传递给一根装有圆锥齿轮的轴,然后通过圆锥齿轮啮合将运动传递给图 7 的凸轮。图 7( a) 所示位置为收集箱的收集状态,在上面拉簧的作用下,挡板挡住临时收集区底部的挡板;随着地轮的前进,凸轮沿逆时针旋转; 当转到图 7( b)所在位置,则收集箱打开,薯块由临时收集区经过排薯区排出,同时随着凸轮的转动,在弹簧的拉力下,将临时收集区关闭,下一分区开始收集薯块。此位置要求开启时间要短,以免在薯块质量的作用下使得下一分区不能正常收集薯块。
2. 3 通过薯块质量控制定向堆放装置的开启
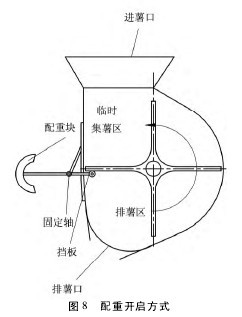
通过薯块质量控制定向堆放装置的开启与关闭有两种思路: 一是通过配重来实现,二是通压力传感器来实现。前一种思路不需要电源,通过纯机械机构来实现; 后一种思路需要通过单片机来实现,需要电源。由于农机工作环境比较差,应尽量使结构简单、维修方便、选择可靠性较高的方案。因此,设计中优先选择配重方式来实现定向堆放装置的开启和关闭。
工作原理为: 配重开启方式依据杠杆原理,当临时集薯区的薯块达到一定质量时,会压绕固定轴转动的挡板往下沿顺时针转动,挡板及配重块绕固定轴旋转,使装置开启,薯块由临时集薯区经排薯区排出; 同时,由于挡板右端的压力消失,配重块绕逆时针旋转,挡板复位,在后续收集薯块重力的作用下,下一分区转到临时集薯区开始收集薯块,从而实现单靠薯块质量实现四分区的单向转动,如图 8 所示。【图8】
3 3 种开启方式性能对比
由于马铃薯收获环境的复杂性,且不同地块、不同年份等因素对马铃薯的单位产量存在较大影响,因此单位垄长的薯块密度存在一定差别。因此,3 种开启方式在可调性、可靠性、维修等方面对机器性能有着重要的影响。其性能对比如表 1 所示。【表1】
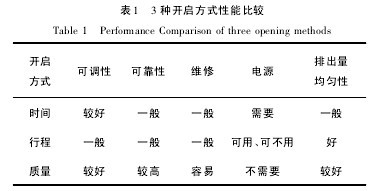
为了能够使定向堆放的薯块质量相对一致,显然通过薯块质量控制堆放装置的开启方式更为合理,其分区收集薯块质量调节方便,可靠性较高,维修相对容易,且不需要电源。
4 结论
设计了马铃薯收获机的定向堆放装置,能够实现马铃薯的定向堆放功能。重点研究了四分区集薯器,并就堆放装置的开启方式进行了讨论,对 3 种开启方式进行了对比研究。配重开启方式具有方便调节收集薯块堆放质量、结构比较简单、不需要额外电源等方面的优点,而且使得每一次排放的薯块质量大致相同,更适合用在马铃薯收获机上。
参考文献:
[1] 张勋. 马铃薯生产机械化与产业发展战略[J]. 农机化研究,2008( 1) : 1-6.
[2] 单爱军,刘俊杰,崔冰冰. 马铃薯收获机现状与发展趋势[J]. 农机化研究,2006( 4) : 19-20.
[3] 邹慧君,殷鸿梁. 间歇运动机构设计与应用创新[M]. 北京: 机械工业出版社,2008.





