0、引言
由于现代海战的非对称、非接触和快速性等特点,现代反水雷作战的主要目的是在战时以最短的时间开辟能够保证战斗舰艇编队或其他任务舰船安全通过雷区的可靠航道,打破敌方的水雷封锁、阻滞或围堵,确保后续作战行动的顺利开展和海军作战目标的实现。在这一情况下,战时反水雷作战兵力面临的最主要任务将是水雷侦查、航线探查、反水雷导航以及为尽快开辟安全航道而进行的航道疏通和局部水雷清除等任务。为在最短时间内为任务舰船开辟安全可靠的航道,可以采取使用探雷声纳在雷区中快速确定部分雷区边界和搜索荐用航道的方法,进而尽快打破敌方水雷封锁,实现作战目的。搜索荐用航道需在已知部分雷区边界和水雷位置的前提下开展规划,其推荐航道的安全性、合理性和快速性将直接影响反水雷作战任务的完成效果。为提高反水雷舰艇在执行航线探查任务中的作战效能,笔者分析其进行荐用航道判定的条件和步骤,并利用搜索最短路径的迷宫算法基本原理进行软件开发,为反水雷作战中快速合理的实现荐用航道判定提供方法。
1、搜索荐用航道的实施方法
荐用航道搜索任务指利用猎雷声纳的探测识别功能,通过对雷区或水雷可疑区域进行侦查,并对可疑目标进行记录,快速搜寻出一条或数条通道,为我任务舰船通过雷区或水雷危险区提供安全保证。
实施荐用航道搜索任务时,应制定搜索计划将雷区或水雷可疑区划分为若干个平行搜索带,搜索带的方向与舰船穿越的方向要基本一致,从中心搜索带开始搜索并逐步依次向两边扩展,并逐带记录下探测结果。若已搜寻过的航线总宽度满足通航航线宽度要求时,检查已发现的水雷位置是否确实允许舰船通航,其要求是搜寻出的荐用航道必须是直线或有限转向的简单折线,如果在探测结果的基础上没有发现可用航道,则继续按原搜索计划扩大搜索范围,直至找到可用航道,如图1所示。完成搜索任务后,应根据水雷和其他碍航目标分布情况和通航航道的宽度要求进行荐用航道判定,其判定结果的准确性、合理性和快速性将直接影响任务舰船的通航安全和后续作战任务的顺利进行。

2、基于迷宫算法的荐用航道判定方法
2.1基于迷宫算法的荐用航道判定基本思想
能否根据荐用航道的搜索结果对荐用航道进行正确判定直接影响到任务舰船的通航安全和反水雷作战任务的顺利完成。错误的荐用航道判定结果会导致任务舰船遭到水雷打击,致使反水雷任务的失败,而对于复杂雷区荐用航道的人工判定需要大量的绘图工作和经验的积累,判定过程通常需要消耗较长时间,可能造成任务舰船行动迟滞和贻误战机等严重后果。
在完成快速确定部分雷区边界和搜索荐用航道的基础上,为了能够快速、合理地对荐用航道进行科学判定,可采用某种搜索算法进行快速查找和计算。由Lee最先提出的李氏迷宫算法作为一种广度优先的搜索算法可应用于对荐用航道的判定工作。
其基本方法是在矩形网格中针对每个单元位置采用上下左右4个扩展方向进行障碍物绕行,从而找到出发点Start和目的点Target之间的最短路径,如图2所示。

李氏迷宫算法的基本思想可以按照对波的传播过程来描述,即在一个存在障碍物的水面上,搜索2点之间的最短传播路径,设Start点为一波源并朝4个方向进行波的传播,传播时无能量损失,观察波的传播情况,当遇到障碍时,波会产生反射,到达水面边缘时也会产生反射,而最先到达目的点Target的波显然所经过的路径最短。只要起点和终点间存在通路,该算法经必然能够找到一条最短路径。
2.2荐用航道判定基本步骤
假定任务舰船计划穿越某雷区,反水雷舰艇已在该雷区根据任务舰船预定航线和航道海区地理情况确定了雷区边界,由于任务舰船的预定航线大致上为自南至北,其航道中线只穿越了雷区南北两条边界,因此只需确定雷区南北2条边界即可。根据荐用航道搜索的实施方法,将雷区分为若干个方向与任务舰船预定航线平行的搜索带,从中心搜索带开始搜索并逐步依次向两边扩展,逐带记录探测结果。完成荐用航道搜索步骤后,将2条边界内的雷区划出若干个方格组成的长方阵形成迷宫,方格宽度和迷宫的设定步骤如下:
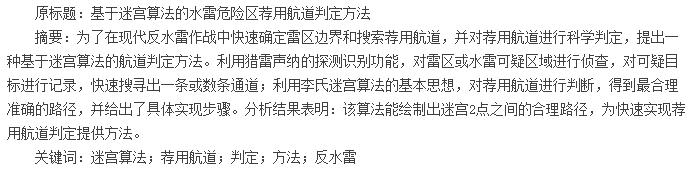
1)将水雷和沉船、浅滩、岩礁等其他碍航物标记在迷宫中。
2)根据碍航物的性质及其对任务舰船航行安全产生影响的最大范围确定方格宽度,对于水雷而言,应首先确定其危险圆半径R:

式中:pm为舰船所受冲击波峰值压强,kg/cm2;G为水雷当量装药量,kg;h为水雷水深,m。再根据水雷危险圆半径R得到确保舰船航行安全的航道宽度B:

船(2)式中:B船为任务舰船的船宽;σ为任务舰船航行误差;R为水雷危险圆半径。
3)由于水雷爆炸对舰船航行安全产生影响的范围最大,因此把确保任务舰船航行安全的航道宽度B作为迷宫方格的宽度。
4)根据已侦查得到的部分雷区边界和迷宫方格宽度,将雷区划为m?n个方格组成的长方阵迷宫。
雷区迷宫划分完毕后,再将水雷和其他碍航物根据其在迷宫中所处的位置和大小(对于其他碍航物,应考虑任务舰船宽B船和航行误差σ的因素)确定迷宫中的障碍物方格位置和数量,即迷宫障碍分布。对水雷而言,无论其处于某一方格的任一位置均视该方格为障碍物,如图3。对其他碍航物而言,则根据其在方格中的位置、大小、形状和舰船航行误差大小确定所在方格是否设为障碍物。
2.3荐用航道判定的实现
根据雷区迷宫的设定,设计迷宫算法,并绘制出迷宫2点之间的合理路径,其基本步骤是:
1)定义二维数组存储迷宫数据,迷宫数据根据搜索得到的雷区边界、任务舰船安全航道宽度B和水雷及其他碍航物在雷区中位置设定。
2)在迷宫中设置某方格为出发点Start,并作为程序运算的当前位置,再设置迷宫中某方格为目的点Target,以0和1分别标示为迷宫中的通路方格和障碍物方格,定义1个以链表作存储结构的栈类型。
3)编写求解迷宫的递归程序,迷宫各方格以三元组的形式输出:
tij(x,y,d)(3)
其中:tij为迷宫中的某一点;x为tij的横坐标;y为tij的纵坐标;d为步进到下一点的方向,0为北,1为南,2为西,3为东。从当前位置向某一方向步进,同时将原位置设为障碍物方格,步进后判断新的位置是否为目的点Target,若是则找到路径,搜索结束,直接跳至步骤5),否则,放置障碍物方格于新位置,以防再次绕回该位置。
4)检测相连单元是否存在障碍物方格,若不存在,则步进至该相邻位置,并将该相邻位置存入堆栈中,然后令该位置为当前位置,跳回至步骤3),若存在障碍物方格,则选择其他方向的另一个相邻位置按照上述步骤继续搜索,如果当前位置所有相邻位置均被搜索过且都存在障碍物方格,则当前位置不能通往出口,从堆栈中弹出一个元素作为新的当前位置,以此位置的一个未被选择过的相邻方向继续搜索。
5)将堆栈中所有位置依次连成一条路径,即得到出发点Start和目的点Target最短路径。
荐用航道判定过程中,可先将雷区中任务舰船预定航线起始位置的无障碍方格作为起始出发点Start位置,而目的点Target可从预定航线在雷区中的终点位置无障碍方格开始设定,如没有满足条件的航线在向两侧的无障碍方格扩展,直至找到最短安全航道。
在探雷声纳完成的一定宽度的雷区侦查基础上,若存在满足要求的荐用航道则停止搜索,将满足条件的航道从图上标注出来。若没有找到满足要求的荐用航道则继续扩大搜索范围,直到找到满足要求的航道,或是在某一区域通过清除最少数量的水雷满足任务舰船的通航要求,此时任务舰船的出发点Start应向航线起始位置两侧扩展再进行判定。
3、荐用航道判定方法的应用扩展
以上基于迷宫算法的荐用航道判定方法立足于4个扩展方向,在实际使用过程中,如果方格宽度较大,最短路径转向较多,则会产生较远的迂回现象,此时可通过将单元位置扩展方向增至8向或16向进行改进,但计算量也会因此增大。
对于实现任务舰船两侧旋回、单侧旋回、单向航行3种任务要求,由于其根本区别在于安全航道的宽度不同,因此也可通过改变迷宫方格宽度的方式分别获得不同情况下的荐用航道,也可以为最短时间完成航道疏通任务提供依据。若雷区水雷密度较小,而任务舰船由于机动能力的限制,其转向次数和角度只能限定在一定数值以内,此时可采取在障碍物方格密度较小的雷区内进行人工分段设置出发点Start位置和目的点Target位置的方法,以确保荐用航道为直、斜或是有限的转向次数。
4、结束语
笔者在对反水雷舰艇航线探查任务实施过程和对荐用航道判断方法原理本质进行分析的基础上,根据李氏迷宫算法的主要思想,提出了基于迷宫算法的水雷危险区荐用航道判定方法,并给出了基本步骤和实现过程。验证结果表明:基于迷宫算法的荐用航道判定方法能够绘制出迷宫2点之间的最合理路径,为快速合理地实现任务舰船荐用航道判定提供方法和途径。文中的方法可为反水雷舰艇作战方案的制定提供理论参考,为反水雷指控系统战术软件的设计提供技术支撑。
参考文献:
[1]徐学章.水雷作战[M].北京:海潮出版社,2009:19-24.
[2]马爱民.水雷威胁探查方案优化方法[J].海军大连舰艇学院学报,2011,34(6):51-53.
[3]张立华.基于电子海图的航线自动生成理论与方法[M].北京:科学出版社,2011:33-36.
[4]傅金祝.国外水雷与反水雷技术[M].北京:国防工业出版社,2007:83-96.
[5]赵国荣,黄婧丽,王希彬.舰船地磁独立导航系统[J].兵工自动化,2012,31(12):33-35.





