摘 要: 阐述了无人系统在军事领域中的重要作用和地位, 以及无人系统的发展现状及其在面向未来战争时面临的挑战。分析了有人系统与无人系统协同时对数据链的使用需求, 并结合作战云理念, 研究了基于分布式云服务的数据链应用系统架构, 给出了有人/无人协同典型组织应用模式, 并进行了关键技术分析, 提出了基于任务、数据和服务的技术需求, 对基于数据链的有人/无人协同效能进行了展望, 以期为后续无人系统数据链应用和开发提供参考。
关键词: 无人系统; 数据链; 协同作战; 作战云;
Abstract: The important role and status of unmanned systems in the military field and the development status of unmanned systems and the challenges in the future combat are expounded. The demand of the data link for cooperative operation between the manned system and the unmanned system is analyzed. Combined with the operational cloud concept, the architecture of data link application system based on the distributed cloud service is researched. The typical application mode of manned/unmanned collaborative organization is given. The key technologies are analyzed. The technology requirements based on task, data and service are presented. The manned/unmanned collaborative efficiency based on data link is prospected. Thus it can provide a reference for the application and development of the future unmanned system data link.
Keyword: unmanned systems; data link; cooperative operation; combat cloud;
0、 引 言
无人系统是由无人平台、使命载荷、指挥控制体系及空-天-地信息网络构成的综合应用体系, 是信息化战争中夺取信息优势、实施精确打击及完成作战使命的主要手段之一。未来的军事斗争均呈现体系对抗态势, 以网络为中心的态势综合、任务规划、指挥决策和协同控制等综合能力已成为制胜关键, 无人系统作战应用也必然向着网络中心战方向转变[1,2,3,4,5]。因此, 有人系统和无人系统间需构建信息化数据通信网络。该网络主要功能并非仅聚焦收集和传输数据, 应更强调数据的自动化处理和辅助决策, 使空间上分散的各系统之间能够实时高效地协同应用, 即典型数据链应用模式。
数据链系统本质是在传感器、指挥控制系统和武器平台间构建时空一致的信息网络, 高效分发和自动处理格式化消息, 实现战场态势共享、指挥控制、战术协同和武器控制等战术应用功能[6,7,8,9]。因此, 无人系统数据链应用重点在于将有人系统和无人系统中各种作战资源和信息处理资源紧密铰链, 提供对无人系统的精确测控能力、无人系统载荷数据的实时获取与处理能力以及无人系统间互操作能力。综上, 无人系统数据链包含了传输组网、集成交链、信息处理以及平台应用等综合应用系统。
1、 应用现状与挑战
由于数据链直接服务于作战应用, 而作战应用的内涵又与作战平台自身的任务使命紧密相关, 不同的无人系统需要不同的数据链应用模式。根据不同的使命载荷和使用环境, 美军构建的无人系统种类丰富且形态各异, 仅无人机就有成百上千种, 且各类无人机差异较大。各类无人平台作用距离、工作时间和使用环境的差异, 导致了无人系统数据链应用迥异。美军开发了多种数据链以支撑无人系统的网络化作战, 如通用数据链 (CDL) 、战术通用数据链 (TCDL) 、武器协同数据链 (TTNT) 和海军武器协同数据链 (CEC) 等。小型无人平台的作用距离一般在视距范围内, 并受限于其载荷能力和工作时间, 特别受限于天线安装尺寸, 另外定制的视距数据链系统相互间无法互连互通, 测控协议也不相同[9,10,11,12,13], 如小型无人机数据链 (SUAS DDL) 。

无人系统的异构导致了其数据链种类繁多、传输组网各成体系且消息协议处理层不同。各无人系统数据链应用通常针对特定的无人系统遥控、遥测及载荷数据设计, 兼容性和扩展性较差。文献[14]指出了无人系统通信具有以下3方面不足:1) 基础设施各自为政:在多个无人系统数据链应用中, 均采用独立的通信方案, 包括超视距通信和地面网络基础设施应用, 导致了系统间资源共享受阻、基础设施间接使用成本增加, 以及系统互操作性受限;2) 信息共享能力差:许多系统使用了专有的处理、分发和任务应用基础设施, 导致系统、军种和机构间无法进行有效的数据共享;3) 全球联通性差:将无人系统的高带宽数据向战略、战役和战术用户进行全球范围内分发的能力不足, 且过分依赖价格高昂的卫星通信, 导致无人系统通信基础设施分布不均, 无法支撑所有地区的作战行动。
针对上述问题, 文献[14]还提出了未来无人系统通信面临的挑战, 包括计划内投入资金资源更有限、无人系统对数据容量需求越来越大、作战电磁环境越来越恶劣、应采用开放式标准以提升互操作性以及应具备体系化能力以提升使用效率等。简言之, 目前无人系统数据链发展以宽带化和网络化为特征, 但其烟囱式发展的数据链基础设施造成了资源浪费及互操作性缺乏, 从而抑制了更多资源参与数据链应用。为了更好的应对无人系统未来面临的挑战, 需从整体架构方面考虑无人系统的数据链应用设计, 构建通用数据链体系架构, 以满足异型无人系统的作战功能应用。
2、 应用需求分析
为了应对无人系统数据链面临的挑战, 需先分析无人系统数据链的应用方式和技术需求。无人系统在军事领域的快速发展代表了主流军事科技发展方向, 其重要特征是数据密集型传感器的不断更新应用, 使数据的产生、获取、分发和使用成为无人系统关键环节, 故数据链在无人系统中的应用需紧扣这一特征。
2.1、 应用样式
为了发挥无人平台机动范围大、侦察手段多及反应速度快的侦察打击任务能力, 构建侦、控、打和评相互衔接的有机整体。无人系统数据链主要包括以下2类典型应用样式:
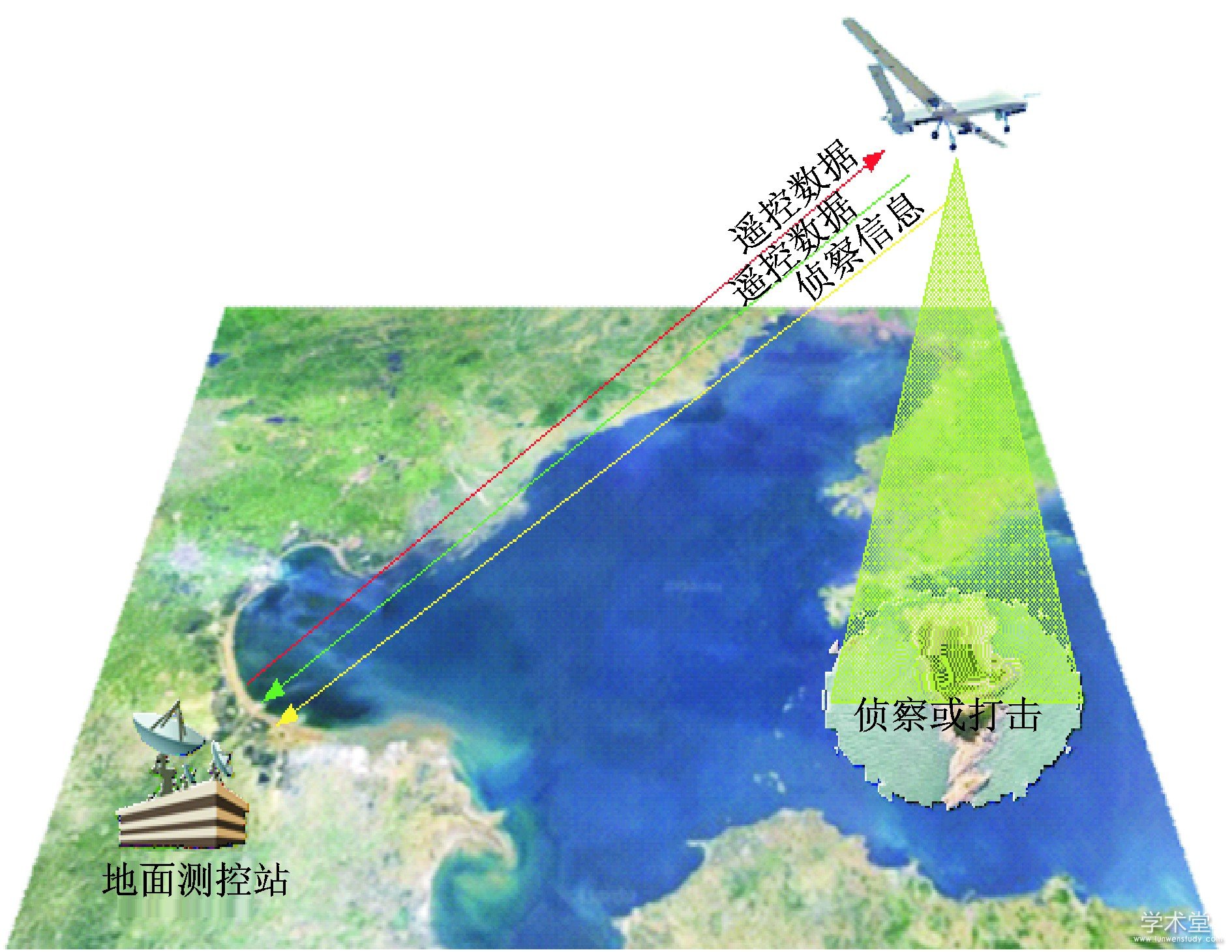
1) 单平台应用:通过单链路实现平台测控及任务载荷数据的传输, 包括对无人平台的飞行/驾驶/航行控制、载荷控制以及链路控制等遥控数据的上行传输;无人平台对测控站的位置、速度和姿态等任务信息以及可见光、红外、激光和合成孔径雷达 (SAR) 等任务数据的下行传输。以地面测控站对无人机的协同数据链为例, 单平台应用样式如图1所示。该模式为典型的点对点测控模式, 由于采用专属资源配置, 故无人系统难以形成大批量体系化应用。
图1 单平台应用样式
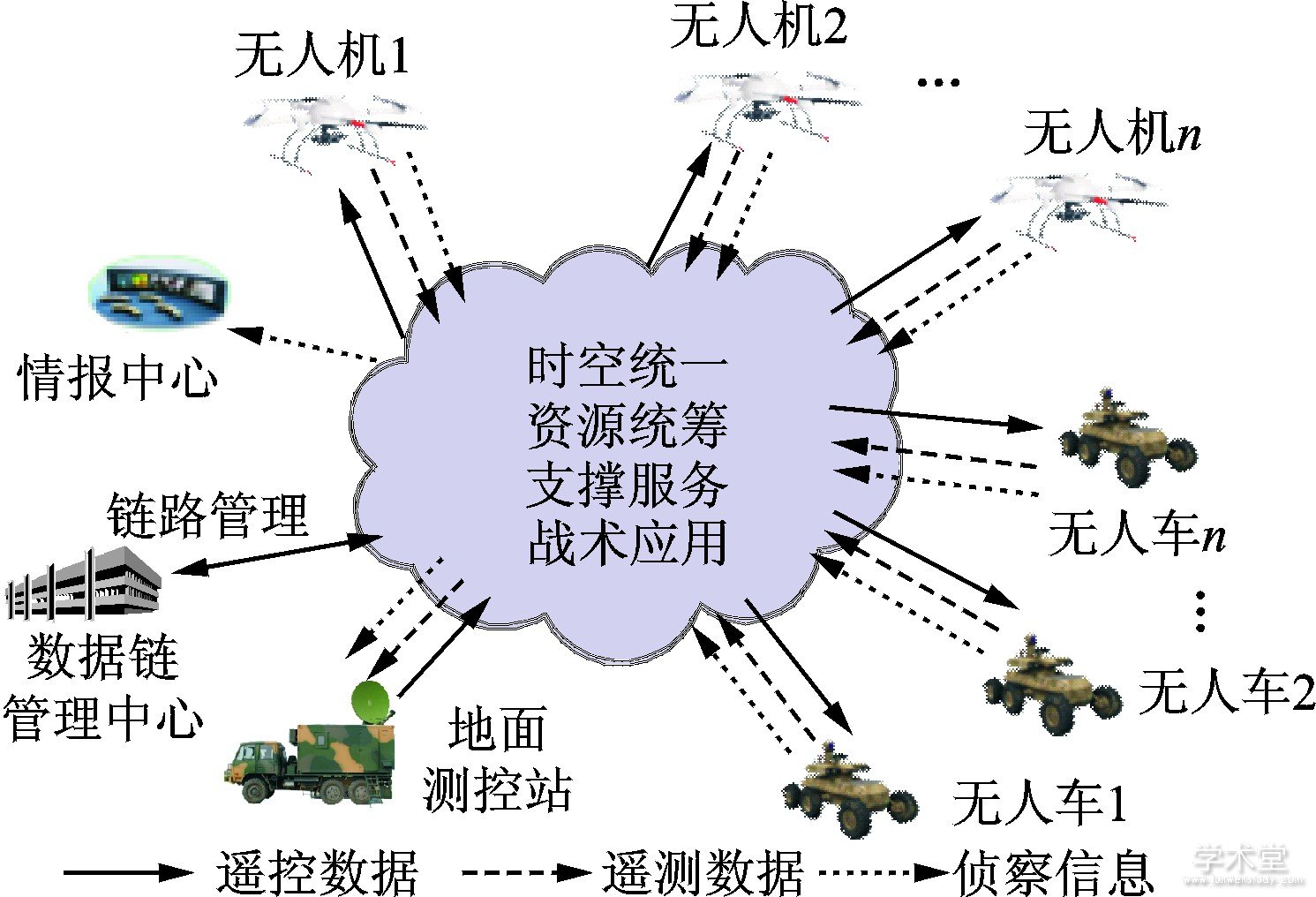
2) 多平台应用:由单机局部行为构成多机全局行为协同, 以编队形式按特定规则组合, 以提高任务完成效率和成功率。在无人平台自主控制任务场景下 (如常规区域组合侦察和定点位置欺骗诱惑等) , 数据链主要回传遥测和侦察信息等数据;在无人平台人工实时操控场景下 (如运动战役有人/无人协同编队攻击和战场态势主观感知等) , 数据链除实现平台状态监测外, 还需实时传输遥控等指令数据, 控制无人平台执行突发性、感官性和应急性操作。与单平台应用不同, 多平台无人系统数据链需解决任务配合时的时空统一、资源全局调度和消息结构统筹等支撑服务和战术应用能力, 实现多平台同区域测控数据兼容互通及任务数据信道共享, 形成分布式松耦合网络化结构。多平台应用样式如图2所示。
图2 多平台应用样式
2.2、 能力需求
为构建无人系统基于网络中心战的体系化协同作战能力, 需先针对无人系统的互操作性和自主控制能力对数据链应用的整体规划与设计提出要求, 即数据链应支持无人系统内各支撑要素的实时参与, 合理设计系统的消息架构、频点资源、时隙分配和接入协议, 确保体系内各节点无冲突兼容测控和协同侦察信息共信道融合传输, 具体包括以下5方面能力需求:
1) 测控数据和载荷信息可靠传输能力:是构筑无人系统网络中心战能力的前提。无人系统数据链作为无人平台与测控站之间的信息通道和连接纽带, 首要任务是高效、可靠和安全, 实时传输遥控、遥测与侦察信息和感知信息等多源异构数据, 需具备数据接入与分发、链路自身状态监控和参数设置等能力。
2) 测控通道多平台、多协议和多模式异构兼容设计能力:是实现无人系统互操作性的关键要素。由于未来信息化战场上将会同时使用大量的无人系统, 因此需制定统一的顶层标准体系, 加强顶层标准建设, 统一消息格式和信号体制, 在不改变核心消息、消息内容和数据元素情况下, 提高规范和精细化程度, 提高系统兼容能力。
3) 任务通道多载荷、多类型和多制式多源共享设计能力:是无人系统形成多源态势信息融合的前提。任务通道需具备拥有标准接口的即插即用能力, 通过通用接口、总线架构和载荷数据通用处理设计, 屏蔽不同任务载荷控制接口、数据接口和通信协议的差异, 实现载荷自动检测识别、载荷参数自动加载配置和载荷状态自动回环测试。
4) 多体制、多逻辑和多功能组合设计能力:是形成无人系统多机协同与交互能力的必要条件。无人系统数据链不仅需传输平台的遥控和遥测数据, 还需传输任务载荷的侦察数据, 测控数据与任务数据在数据的格式、速率和可靠性要求等方面具有较大差异, 需要发展链路综合设计技术, 简化设备并节省频谱, 满足遥测和遥控与通信集合的统一载波体制, 从而提高频谱效率、设备集成度和系统兼容性。
5) 高效数据链网络规划与管理能力:是无人系统数据链应用有效运作的重要保障。网络规划与管理以作战任务对数据链战术应用通信需求为牵引, 最终目的是使数据链网络最大限度地满足作战力量完成作战任务。为确保完成作战任务并达成作战目标, 需协调多无人平台同时行动, 无人系统之间以及无人系统与测控站之间会有大量的通信和指挥控制信息传输, 需构建架构合理、手段多样且方式灵活的多机协同网络。另外, 战场信息瞬息万变, 为掌握战场主动权, 需对网络进行实时监控与管理, 并依据战场态势变化对网络进行重新规划和组织。
3、 基于作战云的架构设计
作战云概念[15,16,17]是基于网络化的信息基础设施, 采用面向服务的模式, 为指挥决策、部队行动和武器打击提供按需、便捷和快速的数据与应用服务, 其本质与无人系统以数据链为中心、以格式化消息为互操作语言、有人/无人系统高效协同应用的典型特征是相符的。无人系统数据链以网络为中心、以应用为牵引并推动格式化信息在数据链网络中实时流转, 按需提供服务, 将陆、海、空、天、电和网等多维空间的各类有人/无人系统要素融合集成, 形成感知、决策、行动和保障等作战资源协同应用的分布式架构系统。
3.1、 系统架构
无人系统数据链应构建于联合战术信息系统[18]框架下, 数据链中的各平台既是资源提供者, 又是资源和服务使用者。通过数据链网络, 按照任务动态聚合各类资源, 提供共用数据和共性应用服务, 实际上已初步具备了云的架构理念。当无人系统中平台数量逐渐增加时, 数据链可将空域上分散的各有人和无人平台紧密连接起来, 形成网络化作战云, 通过快速交换系统内各平台的数据, 整合信息资源, 获取规模效益。
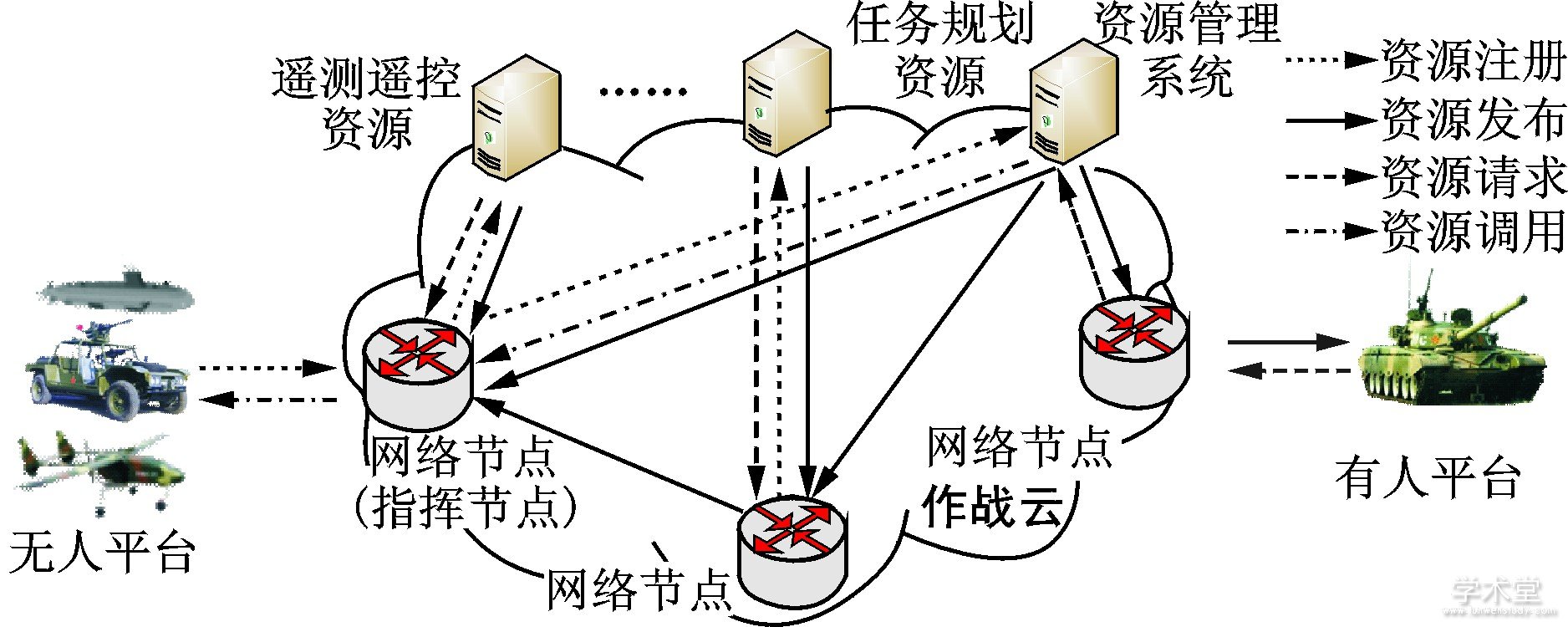
与通常的作战云不同, 构建无人系统的作战节点其本质特征在于构建无人系统间的自主协同能力, 即在尽可能减少人员干预的情况下, 充分利用数据链互操作能力实现多无人系统协同作业, 共同完成作战任务, 提高任务执行效率, 拓展新的任务执行方式, 从而达到提高系统可靠性以及改善任务执行效果的目的。借鉴作战云思想, 无人系统数据链网络体系采用云—端系统架构, 通过数据链将感知、火力、通信、计算和存储等资源从各类无人系统以及基础支撑设施中开放出来并虚拟化, 以资源池形式联入云。同时, 为了实现无人系统间的协同能力, 还需将无人系统任务管理与分配系统、无人系统航路规划系统以及网络规划与管理系统作为数据链的重要资源纳入作战云框架中。无人系统资源虚拟化框架如图3所示。
图3 无人系统资源虚拟化框架
根据不同的无人平台应用样式, 无人系统主要包括以下2种云架构:
1) 各无人平台依据作战任务需要和平台自身特点, 通过自主发现策略形成自组织数据链网络, 实现平台间的资源按需共享, 高效协作完成作战任务。例如, 无人机蜂群自主完成编队飞行、协同搜索、协同打击和协同查/打等作战任务, 无人系统通过作战计划和航迹规划预加载知晓作战任务, 依托数据链实现分布式的态势综合和动态航路调整, 实时完成作战任务计划的调整和执行。该架构主要支撑多无人平台自主应用模式, 在没有基础设施随行保障前提下, 依托自组织和互操作实现无人平台集群协同作战。
2) 各无人平台接入数据链基础设施, 作为数据链网络资源池的有机组成, 通过数据链自动分享作战云提供的态势融合、任务清单分配、航线规划和威胁评估等服务, 实现无人-无人、无人-有人的高效协同与自主作战能力。相比传统作战云概念, 基于无人系统的数据链应用更强调引入自动态势综合、任务自动生成、航路自动规划以及网络自动管理等资源和服务能力, 自动完成平台间信息交互与任务协同, 高效完成作战任务。该架构可有效支撑单无人平台应用以及多无人平台的复杂协同应用模式, 在基础设施支撑下, 可提供更加自动化和高性能的任务规划、实时测控与资源管理等服务, 丰富无人与有人协同的业务功能, 并提升系统整体性能。
以上2种云架构应能实现无感共存及动态切换, 以保障作战任务完成为最终目标, 智能化动态调整资源发现、共享、调度和优先级策略, 支撑面向协同态势感知、指挥决策、行动控制和支援保障等作战任务, 以及支持面向协同作战的各类应用。无人系统数据链不应局限于信息传递, 而应贯穿于数据的产生、分发、处理和综合应用全过程, 从体系上保障系统的完整运作。
3.2、 技术架构
通过无人系统数据链网络, 无人系统可支撑地域分散资源的调度, 实现侦察和打击力量的分散化和虚拟化, 使打击链从传统专网保障模式转变为新型网络化运用模式, 实现作战资源的网络化共享与综合运用, 其中关键因素包括分散资源、可调度服务以及网络化应用。因此, 无人系统数据链体系遵从联合战术信息系统框架, 即同样采用资源—服务—应用的技术架构, 但相较于有人系统的指挥控制数据链, 在相应的资源和服务层应突出无人系统数据链的自身特点。
通过资源虚拟化技术, 将所有战场资源抽象出来成为可共享的服务, 并通过共用信息基础服务为有人与无人系统的协同侦察、协同打击、协同防御以及协同支援等应用提供支撑[19]。无人系统数据链技术架构如图4所示, 具体包括以下3层:
1) 资源层:根据无人系统运行特点, 应重点适应低时延高可靠的通信网络资源、支持一站多机的遥测遥控资源以及适应人工智能任务分配与规划的计算资源等, 同时包含时空基准和安全保密等各类数据链资源, 以及部署于无人平台上的火力和传感器等任务系统资源, 这些资源遵循可描述、可发布、可发现和可访问的共享原则纳入网络信息体系资源池。
2) 服务层:按照一切资源皆服务的设计理念, 将无人系统中与应用、管理和策划相关的各类资源开放出来并虚拟化, 使之融入云, 具体包括以下3类服务: (1) 资源虚拟化服务:按照作战云网络信息体系的框架、接口和流程进行资源虚拟化, 并提供给云端;同时, 根据作战平台需求, 从网络信息体系的云端获取资源。 (2) 共用信息基础服务:提供包括适用于无人系统作战任务的网络规划与配置管理、各类资源与服务注册、检索和调度管理, 以及各类作战应用所需的各类共性服务支撑。 (3) 功能服务:适应无人系统自身特点, 将功能服务分解为消息层、信息层和人工智能知识层3个维度, 实现态势综合、任务生成和航路规划等资源的虚拟化, 为态势感知、指挥决策、行动控制、支援保障和资源管理等上层作战应用提供服务支撑。
图4 无人系统数据链技术架构
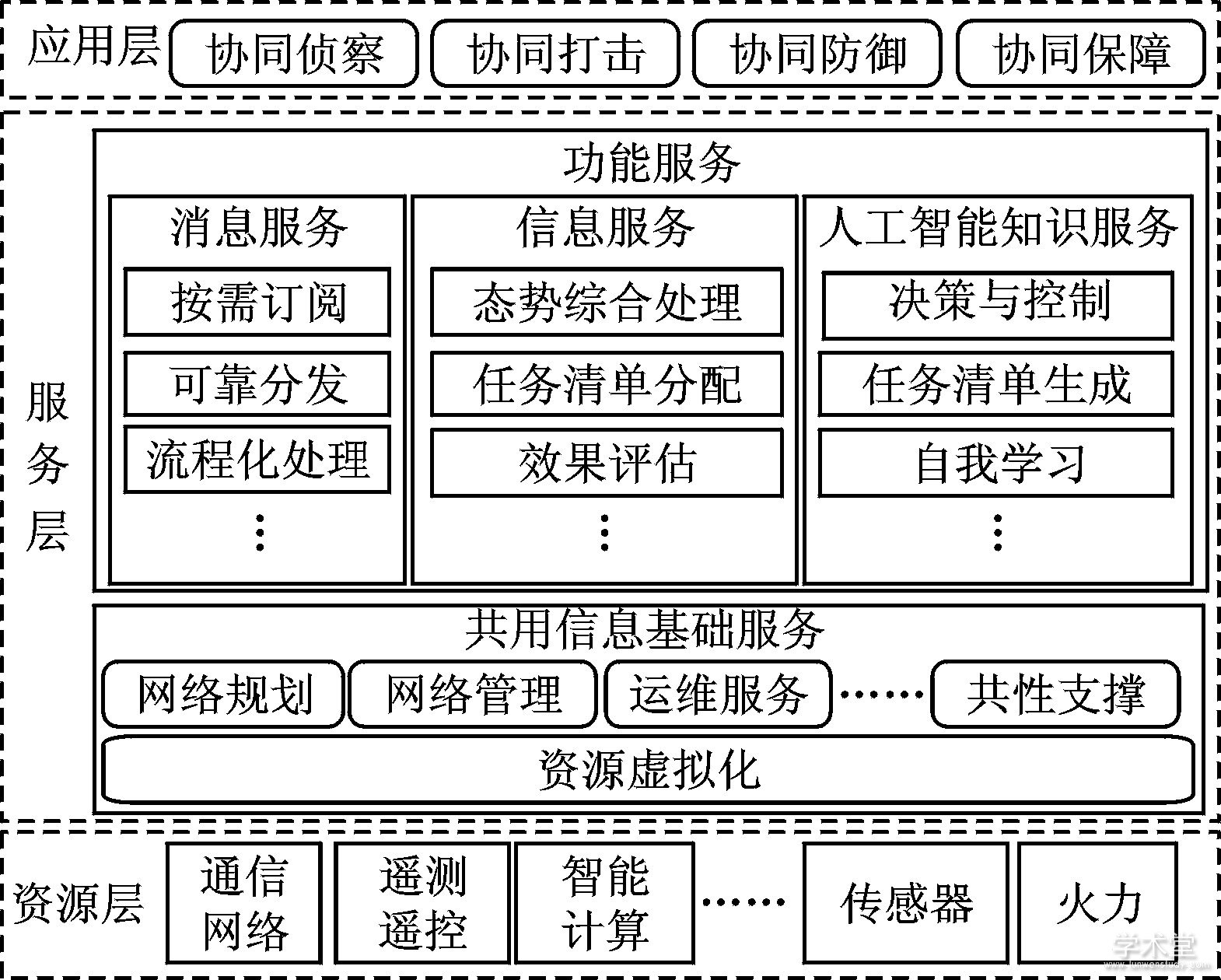
3) 应用层:针对作战平台的作战使命和任务, 按需灵活加载各类有人/无人系统的协同应用, 满足以协同为主要特征的各类无人系统作战应用, 实现战场资源的按需分类聚合和跨域组合应用。
3.3、 应 用
实际应用中, 各无人平台存在接入数据链网络云基础设施和点对点直通2种应用模式。前者包括无人平台入网、平台资源服务发布、云设施资源服务调用和基于云设施的协同作战等流程;后者包括网络建立、资源服务发布和平台自主协同作战等流程。本文以无人机侦察确定打击目标, 多个火力打击平台协同打击的作战想定为例, 给出了无人系统数据链架构支撑下多个无人平台的协同作战应用流程。无人系统协同数据链典型工作流程如图5所示。
图5 无人系统协同数据链典型工作流程
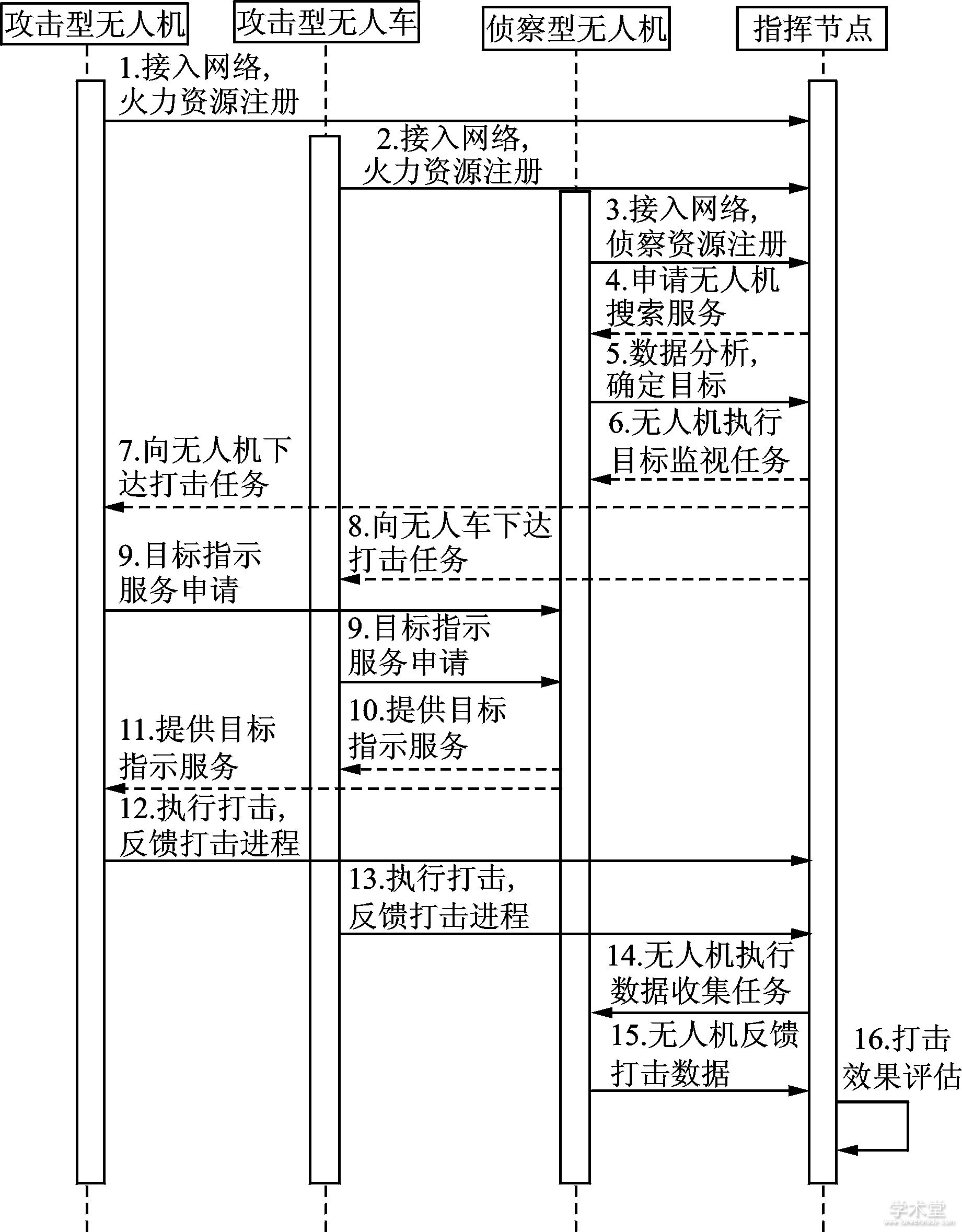
限于篇幅, 将无人系统协同数据链典型工作流程简化为以下步骤:1) 空间分散的无人火力打击平台通过协同数据链接入数据链网络, 火力资源通过资源虚拟化服务注册到作战资源池中 (构建我方态势) ;2) 无人侦察机通过协同数据链接入数据链基础服务;3) 指挥节点通过测控服务对多无人平台进行测控;4) 无人机执行侦察任务, 发现可疑目标后, 通过协同数据链将数据回传;5) 指挥节点进行作战决策分析, 确定打击作战任务;6) 经评估、计算和分析, 寻找合适火力打击资源, 通过协同数据链对攻击型无人机和无人车下达协同打击任务;7) 攻击型无人机和无人车申请目标实时指示服务, 由侦察型无人机提供相关资源和服务;8) 火力打击平台执行打击任务, 并将打击进程反馈到指挥控制节点;9) 指挥节点通过协同数据链向侦察型无人机下达打击结果评估服务申请;10) 侦察型无人机收集目标损毁情况数据, 通过协同数据链回传后由指挥节点进行打击结果评估。
4、 关键技术
基于作战云理念构建无人系统数据链, 需要解决以下3类问题:1) 形成以作战任务为驱动的数据链网络规划与部署, 需借助云端资源实现任务生成和网络规划自动配置等关键技术;2) 形成以数据为中心的互操作能力, 需制定统一的无人平台异型消息标准;3) 形成以应用为牵引的通用无人测控链路的设计与实现。最终, 实现资源虚拟化、服务标准化和应用一体化的设计目标[20]。
4.1、 以作战任务为驱动的数据链网络规划与部署
有人/无人协同需借助大量的运算资源进行任务生成、分配与网络自适应规划部署, 由于有人平台自身计算资源有限, 因此需借助作战云上分散的各类专用计算资源完成计算处理。其中, 任务分配与网络规划是实现有人/无人协同的2项关键技术。
1) 任务分配技术:是无人系统应用过程中需考虑的重点问题之一, 其作用在于建立无人系统与作战任务之间的关联和映射关系, 从而使整体性能在一定指标函数下得到最优化水平。该关联关系包括多种任务条件下的任务时序关系、无人平台与目标之间的任务映射关系、多无人平台与多目标之间的资源调配关系等。任务分配处理流程如图6所示。
图6 任务分配处理流程
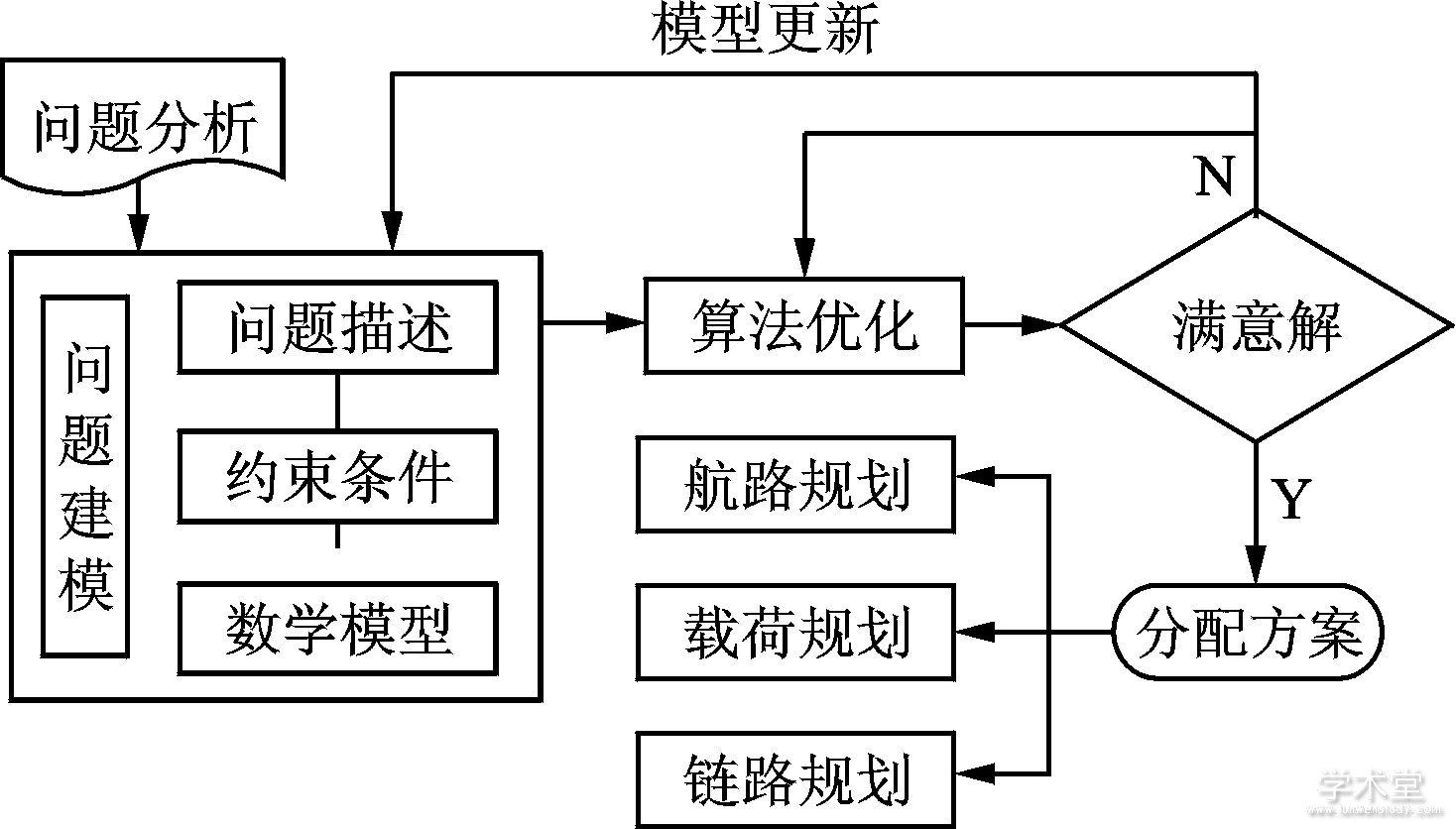
无人系统任务分配是一种复杂的组合优化问题, 主要包括以下3类求解思路: (1) 基于穷举思想的方法; (2) 启发式搜索方法, 如模拟退火、禁忌搜索和遗传算法等, 通过在搜索过程中加入启发因子, 引导搜索向期望的方向进行; (3) 智能计算方法, 如Hopfield神经网络、满意决策理论、蚁群算法、拍卖理论、市场调配理论及合同网算法等, 这些算法计算量较小, 适合实时协同目标分发。只有在获得无人系统的任务分配后, 才能确定相应的网络、航路规划、载荷、计算和存储等基于云服务的资源要素, 为数据链应用提供依据。
2) 网络规划技术:决定了整个无人系统数据链的可用性与适用性, 其规划过程应依托作战任务确定所需的信息和互通性要求, 确定不同任务由哪个平台支持, 并提出可满足作战要求的网络结构、接口设计以及消息集, 规划内容应包括以下4个方面: (1) 从网络设计库中查询、选择和匹配合适的网络设计预案; (2) 将网络设计中的平台与具体参战平台进行关联; (3) 分配和管理每个参战平台的任务; (4) 协调密钥、频率和消息集的使用。网络规划流程如图7所示。
图7 网络规划流程
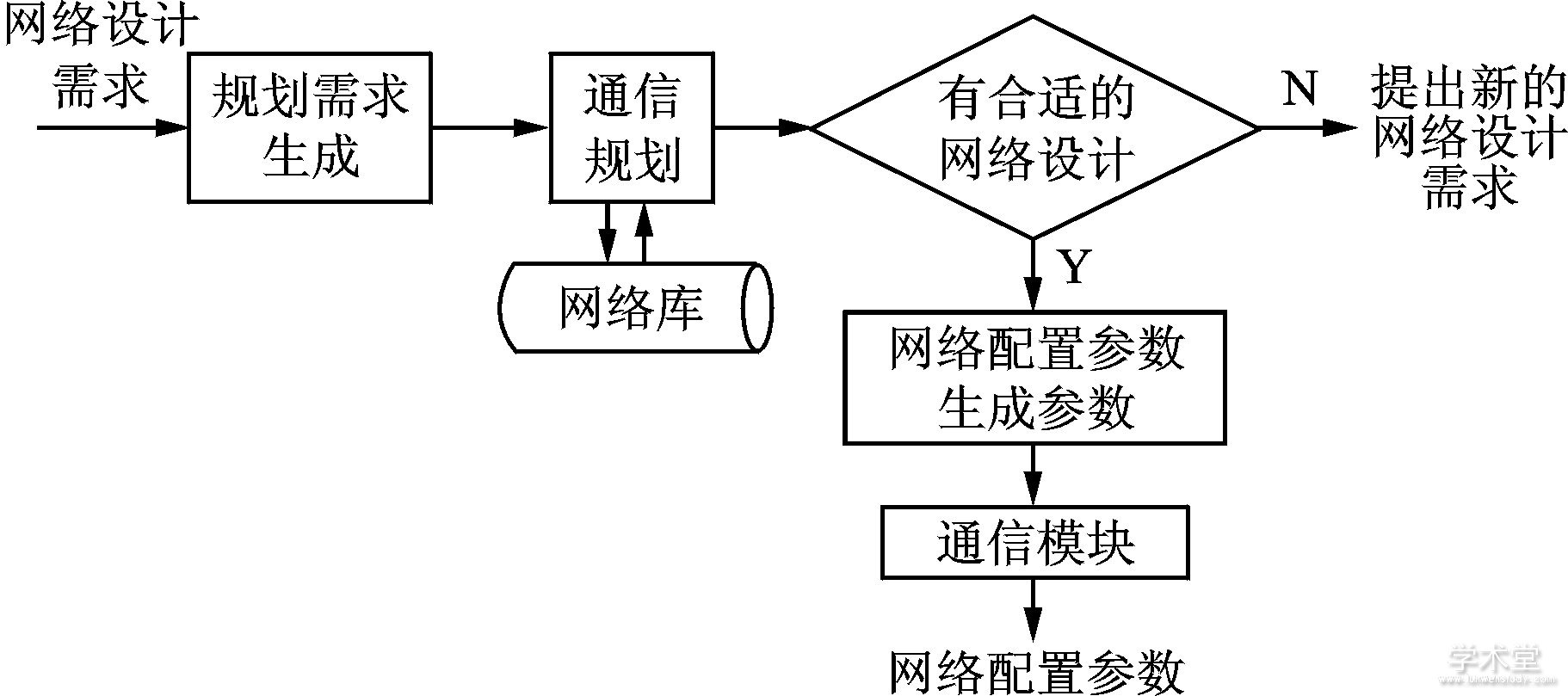
为了确保入网节点各通信设备的正常工作, 需分析设备在特定战术环境下使用的约束条件, 典型的网络规划约束包括视距传输、组网、电磁兼容、可靠性抗毁性、传输时延和其他等约束。同时, 还需遵循以下重要的网络规划原则:网络容量应有适当冗余;连通性要求应突出;网络拓扑结构应易于调整;网络结构的抗毁性和顽存性应加强;作战保密要求应满足。
4.2 以数据为中心的互操作设计
有人/无人协同中最直接和最纯粹的就是数据交互, 以及在数据交互驱动下的各类联合协同侦察、打击和防御等互操作行为。因此, 作为数据的直接载体——数据链格式化消息应具备互操作的统一设计。
目前, 各类无人平台消息格式设计仅针对自身的遥控、遥测及侦察数据设计, 兼容性和扩展性较差, 难以满足异构平台异型链路消息格式互认互容。如何在无人平台测控链基础上, 以最小改动设计出能包容各型无人平台的最优效率的标准化消息格式成为难点。另外, 以电子、通信和网络为基础的测控领域发展迅猛, 其技术快速革新, 为了满足测控消息升级需求, 以数据为中心的互操作设计技术成为了实现标准化服务的关键。
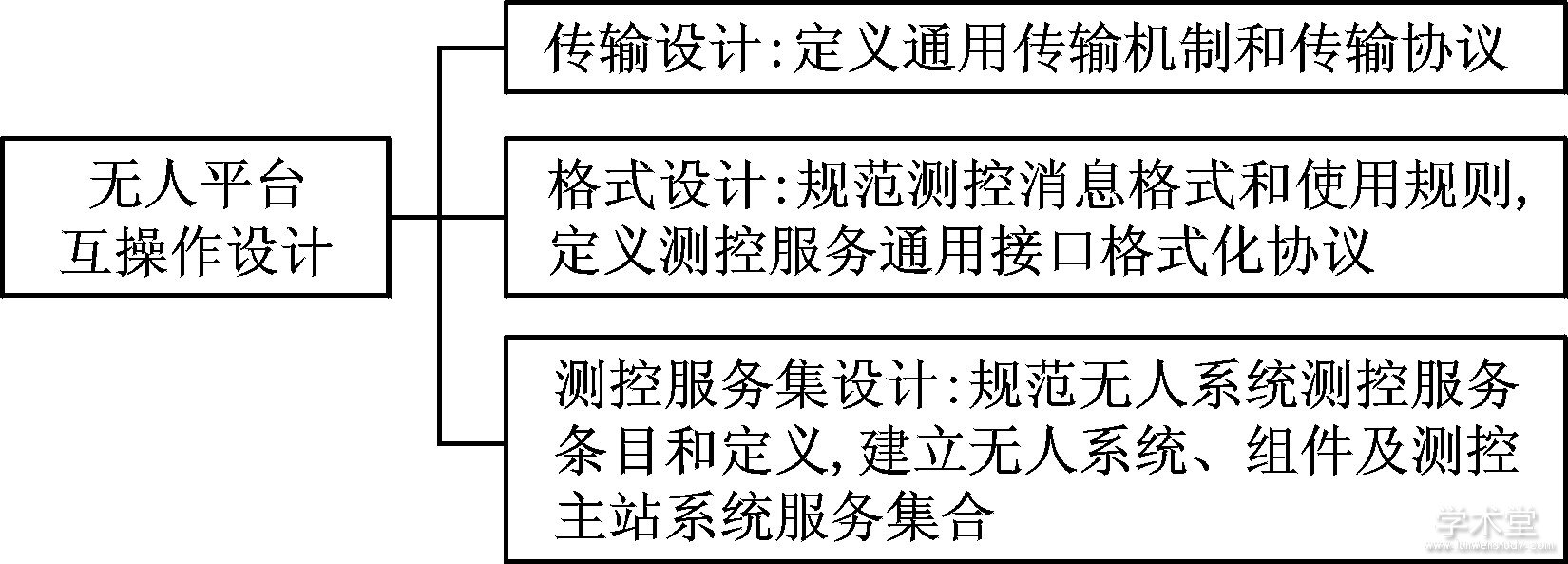
为支持有人/无人平台间的互连、互通和互操作, 同时实现无人平台与有人平台间的解耦, 实现网络测控能力, 需对无人平台通用测控消息处理流程进行设计, 并遵循无人平台独立、使命隔离、计算机硬件独立、技术独立和操作员使用独立5个原则, 主要包括传输、消息格式和测控服务集等设计工作。无人平台互操作设计如图8所示。
图8 无人平台互操作设计
4.3、 以应用为牵引的通用无人测控链路设计
随着无人平台种类和数量不断增加, 无人平台与测控站之间的绑定使用、频段占用、波形体制及架构接口等差异性越来越突出, 在同一区域作战应用时不仅难以互连互通, 而且容易产生频谱冲突造成系统内自干扰, 存在体制多、应用专和兼容性差等问题。如何从顶层推动异型无人平台测控链路通用化设计, 实现测控体系、硬件架构和接口标准的通用性, 以及自主频谱检测、冲突避免、动态加载和智能调整, 成为多平台协同任务的难点。该技术是实现各类测控链路资源虚拟化的关键。
针对上述问题, 应重点展开以下4方面研究工作:1) 体系通用化:研究外军现役、在研和规划的无人平台系统路线, 分析测控体系通用化最大包络, 从顶层推动入网规范的建设, 推行标准化架构, 实现硬件平台到通信体制等的一致性设计;2) 接口标准化:结合飞控、操控和载荷常用接口形式, 开展测控接口的标准化设计, 使无人平台与测控站设备解耦;3) 频段规范化:结合军用和民用频谱使用规划, 为无人平台规范可用频段, 并针对不同无人平台的任务特点合理分配工作频率范围;4) 体制多模化:同一平台兼容多模波形体制, 同一波形体制适应多种平台, 通过体制多模化灵活拓展用户容量, 实现密集异型无人平台通用测控。
5、 效能展望
通过开展无人系统数据链应用综合能力构筑, 强化基于作战云的体系建设, 突出无人系统互操作和自主控制能力, 以期达到以下2方面作战效能:1) 多无人平台测控数据消息统一和接口通用, 载荷数据信道共享、兼容并存和统一入云, 实现多平台协同侦察、协同攻击和协同定位, 发挥组合任务能力, 形成编队合力;2) 有人/无人系统协议互通和消息互译, 载荷数据信道共享和按需调整, 实现有人/无人系统互操作, 延伸有人平台触手半径, 颠覆传统作战模式, 提升基于网络中心战的综合体系作战能力。
6、 结束语
无人系统数据链是联合战术信息系统重要组成部分, 统一在资源—服务—应用设计框架下, 摒弃过去烟囱式设计理念, 以网络为中心, 以应用为牵引, 以数据为载体, 以服务为内容, 组织网络, 聚合资源, 按需构云, 真正发挥有人与无人系统的聚合优势, 在降低通信基础设施投入的前提下, 大幅提升协同能力, 从而构筑无人系统的体系化作战优势。
参考文献
[1] 李琳, 高晓光.有/无人机协同作战指挥控制的关键技术[C]//第二届中国指挥控制大会论文集.北京:中国指挥控制学会, 2014.
[2] 吴文海, 刘锦涛, 刁军.无人空中作战系统关键技术研究[J].飞机设计, 2015, 35 (3) :42-46.
[3] 李相民, 薄宁, 代进进, 等.有/无人机编队协同作战指挥控制关键技术综述[J].飞航导弹, 2017 (9) :29-35.
[4] 刘慧霞, 席庆彪, 李大健, 等.电子战无人机协同作战关键技术发展现状[J].火力与指挥控制, 2013, 38 (9) :5-8.
[5] 王磊, 曹龙.数据链支持下的武器系统评估体系研究[J].火力与指挥控制, 2014, 39 (12) :66-69.
[6] 骆光明, 杨斌, 邱致和, 等.数据链:信息系统连接武器系统的捷径[M].北京:国防工业出版社, 2008.
[7] 尹亚兰.战术数据链技术及在联合作战中的运用[M].北京:国防工业出版社, 2014.
[8] 李宏智.战术数据链的发展与作战应用[J].舰船电子工程, 2010, 30 (4) :1-5.
[9] 李云茹.战术数据链及其应用技术[J].中国电子科学研究院学报, 2007, 2 (2) :211-217.
[10] 夏永平, 陈自力, 林旭斌.无人机数据链发展现状及关键技术研究[J].飞航导弹, 2016 (11) :50-53.
[11] 李桂花.外军无人机数据链的发展现状与趋势[J].电讯技术, 2014, 54 (6) :851-856.
[12] STANSBURY R S, VYAS M A, WILSON T A.A survey of UAS technologies for command, control, and communication (C3) [J].Unmanned Aircraft Systems, 2009, 54 (1/2/3) :61-78.
[13] 李军.海军协同交战能力 (CEC) 分析[J].舰船电子工程, 2011, 31 (5) :25-28.
[14] DoD.Unmanned systems integrated roadmap FY2013—2038[R].Washington C.D.:DoD, 2013.
[15] 赵国宏.作战云体系结构研究[J].指挥与控制学报, 2015, 1 (3) :292-295.
[16] 罗金亮, 宿云波, 张恒新.“作战云”体系构建初探[J].火控雷达技术, 2015, 44 (3) :26-30.
[17] BONOMI F, MILITO R, ZHU J, et al.Fog computing and its role in the internet of things[EB/OL]. (2012-08-17) [2018-03-15].http://www.doc88.com/p-9099317597745.html.
[18] 李云茹.联合战术信息系统及其技术发展[J].指挥信息系统与技术, 2017, 8 (1) :9-14.
[19] 夏令儒, 孙首群.多无人机协同任务规划[J].电子科技, 2018, 31 (1) :4-8.
[20] 岳源.多无人机协同自组织机制研究[J].兵器装备工程学报, 2018, 39 (1) :153-156.





