摘 要: 随着计算机技术的不断进步, 图像更普遍地运用于生活之中, 图像预处理技术也更加完善, 而图像滤波正是图像预处理中十分重要的一步。图像滤波可以使图像的成像质量更高, 而且更方便对图像的进一步处理, 所以通常是图像预处理中不可或缺的一步。本文介绍了图像在计算机的存储方式、噪声等概念, 并主要对中值滤波、限幅平均滤波、高斯滤波这三种滤波算法的原理和实现过程进行说明, 通过对比不同算法的特点, 得出各自算法的适用情况。
关键词: 滤波; 噪声; 滤波算法;
1 数字图像的存储及噪声分类
1.1 数字图像在计算机中的存储方式
图像在计算机中会转化为计算机可识别的数值来进行存储, 数字化图像数据有两种存储方式:一为位图存储、二为矢量存储。由于本文主要使用的都是位图图像, 所以下文将主要介绍位图存储。位图图像是由一系列像素 (像素值取0~255) 组成的可识别图像, 所以可以把一幅图像看成一个数字矩阵, 矩阵的每一个元素对应于图像中的一点, 而相应的值对应于该点的颜色或者灰度。例如一张分辨率为640×480, 16位色的图片, 就可由216=65536种颜色约640×480=307200个像素点组成[1]。位图图像的优点与缺点都同样明显, 在优点方面, 位图图像可以表现出丰富的图像效果和颜色, 可以更加逼真的表现图像细节, 这就是为什么平时我们使用的图像都是位图图像的原因。但是, 位图图像由于每一个存储单元都是一个单独的像素导致颜色丰富的位图图像的储存占空间较大, 在传输文件时会很慢。而且位图图像不能放大太大, 在放大时, 位图图像的像素不会随之改变, 因此图像会出现失真的情况。
1.2 噪声及噪声分类
图像噪声就是指存在于图像中的不必要的信息, 也就是说图像中存在的干扰人们获取图像信息的因素就是噪声。噪声在理论上可以定义为“不可预测, 只能用概率统计方法来认识的随机误差”, 描述噪声可以借用随机过程的描述, 即用其概率分布函数, 由于噪声的存在严重干扰了图像的质量, 因而在图像增强处理和分类处理之前, 必须予以纠正[2]。噪声按性质分类主要有:椒盐噪声, 高斯噪声, 伽马噪声、泊松噪声、乘性噪声等。最常见的噪声为椒盐噪声和高斯噪声。
椒盐噪声就是图像上随机出现的或白或黑的像素点, 如同盐或者胡椒撒在图片上一样。椒盐噪声的成因主要是在信号接收过程中, 突然受到强烈的干扰。

高斯噪声的特点是噪声的幅度分布为高斯正态分布曲线 (二维高斯正态分布曲线) , 由中心点向外辐射逐渐模糊, 高斯噪声的成因主要是在采集信号时突然的强光或者高温造成的传感器噪声。
2 常见三种滤波技术的原理
滤波一词源于通信, 它是从含有干扰的接收信号中提取有用信号的技术。由于成像系统、成像设备均不完善导致数字图像在形成往往伴随着多种噪声干扰, 图像滤波也就是为去除这些干扰我们获得图像中有用信息的噪声而存在, 原理与通讯滤波相似。如果要构造一种滤波器必须考虑两个因素: (1) 能否有效去除噪声; (2) 能否在去除噪声的同时, 保护目标图像的特征。因此针对于以上因素, 我们构建了三种滤波器来解决这个问题。
2.1 中值滤波
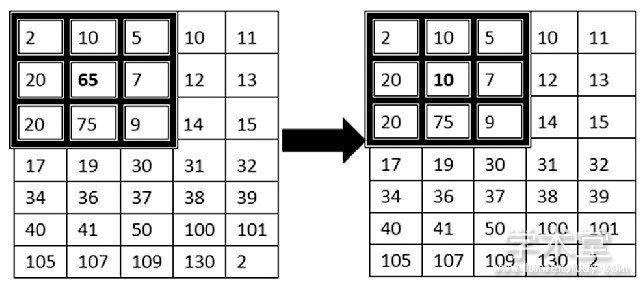
中值滤波是一种非线性平滑技术, 其实现方式较简单;首先构建一种二维模板, 二维模板通常为n×n的区域 (由于n×n的奇数区域更方便取中心点, 奇数个数字也更方便取中值, 因此n常取奇数) 当然, 也可以是不同的形状, 如线状、圆状、十字形或圆环形。从前至后对一张图像进行处理, , 在二维模板的区域内取所有像素值的中位数对二维模板的中心点进行替换, 接着向后移动一个像素单位时, 最后重复此操作直到图像中所有被覆盖的中心点的的像素值都被中值替换。
具体实现过程见图1, 用矩阵代表一张灰度图像, 二维模板取3×3的区域。
图1 中值滤波示例
2.2 限幅平均滤波
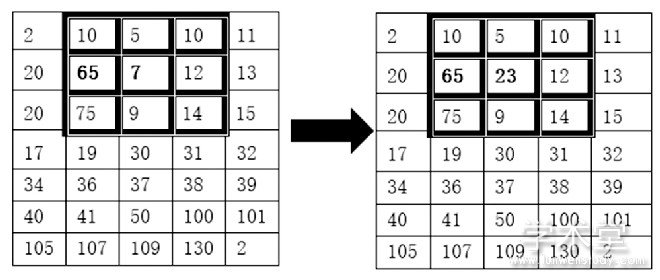
限幅平均滤波其实结合了两种滤波方法一为限幅滤波, 二为算数平均滤波。处理方法与中值滤波相似, 首先设定一个像素幅度A, 接着判断当前二维模板所覆盖中心点的像素值和前一个中心点像素值的差值的绝对值是否超出所设定幅度, 若未超出所设定幅度则不对当前中心点进行处理, 若超过所设定幅度, 则将当前中心点的值变更为此而为二维模板内所有像素值的平均值, 重复此操作直到处理完整张图像。
具体实现过程见图2, 设幅度A=40, 二维模板为3×3的矩阵。
图1 限幅平均滤波示例
2.3 高斯滤波
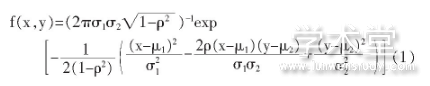
由于均值滤波会使图像模糊的缺点, 产生了高斯滤波这种滤波器。高斯滤波的方式是对数字图像中所有像素值进行加权平均, 且根据一定的标准给不同的像素值分配不同的权重 (离中心点越近的像素值分配的权重越大) 。首先定义一个n×n的模板, 再设定一个σ, 然后根据公式 (1) , 就可以得到二维模板的权重矩阵, 再计算整个二维模板覆盖区域的像素值的加权平均值, 然后模板向后一个像素值单位, 重复此操作得到新的图像[3]。
3 三种滤波技术的特点分析及适用场景
3.1 中值滤波特点及适用场景
中值滤波的优点有很多, 首先中值滤波操作方式简单, 其次, 根据中值滤波的算法可知中值滤波可以很好地保护图像的边缘信息不被破坏, 再者中值滤波选择合适的点来替代图像中的污染点, 而保护图像的大部分内容, 中值滤波尤其适用于椒盐噪声的处理, 因为椒盐噪声的图像内有干净点和污染点, 通过处理污染点就被合适的点替换, 所以中值滤波可以很好地滤除椒盐噪声。但中值滤波也有缺点, 一般来说图像中比较明亮和比较暗的区域都通过中值滤波滤除, 但是较大区域的噪声一般会原封不动的保存下来[4]。所以, 经分析中值滤波对于区域较大的噪声的滤除效果不好, 对于点状噪声的滤除效果最好尤其是椒盐噪声。
3.2 限幅平均滤波特点及适用场景
限幅平均滤波结合了限幅滤波和均值滤波两种图像滤波方式的优点, 其中限幅滤波算法的优点是能克服偶然因素引起的噪声, 而均值滤波算法简单能很快的对图像进行平滑处理, 也就是能将由于屏幕显示的分辨率不高的图像出现的锯齿边缘平滑, 但限幅滤波的缺点是无法处理周期性产生的噪声, 均值滤波的缺点是由于对对图像锯齿边缘进行平滑处理而导致图像趋于模糊。所以限幅平均滤波适合处理颗粒噪声, 特别是盐噪声, 但是如果处理椒盐噪声会导致图像模糊而不会去除掉图像中的噪声, 而且不适用于周期性变化的噪声。还有在运用限幅平均滤波法时必须提前知道噪声是亮噪声还是暗噪声, 不然会导致图像大幅变白或变黑的情况, 所以在运用限幅平均滤波时最好对图像分步进行处理:在亮噪声多的区域使用针对于亮噪声的处理方式, 在暗噪声多的区域进行针对暗噪声的处理方式。
3.3 高斯滤波特点及适用场景
高斯滤波对于高斯噪声处理效果特别好, 由于高斯噪声是由中心点开始呈现模糊, 具有一定的模糊半径, 但一般不知道模糊半径和边缘方向。而高斯滤波很好地处理了这一问题, 因为二维高斯函数具有旋转对称性, 所以使用高斯滤波处理图像时不会出现偏向任意一方的情况, 而且邻域内的像素的权重是随离中心点的距离单调递减的, 所以使用高斯滤波处理图像时不会对边缘的影响过大, 不会像均值滤波那样因为过度的平滑处理而导致图像边缘模糊而导致图像失真。但是高斯滤波的缺点也很突出, 高斯滤波这种图像处理方式基本上只能运用于高斯噪声。总的来说, 高斯滤波能很好地滤除高斯噪声, 而且对图像的平滑更好, 不会造成图像的大幅度模糊, 对边缘的处理效果也较好, 缺点是基本只能运用于高斯噪声, 对椒盐噪声等其它噪声很难达到好的滤波效果。
参考文献:
[1]齐欣.数字图像的存储方式及传输途径[J].照相机, 2004 (7) :37~38.
[2]张安定, 衣华鹏, 崔青春.《遥感原理》研究性教学的探索与实践[J].测绘通报, 2005 (12) :59~61.
[3]丁怡心, 廖勇毅.高斯模糊算法优化及实现[J].现代计算机 (专业版) , 2010 (8) :76~77.
[4]高浩军, 杜宇人.中值滤波在图像处理中的应用[J].信息化研究, 2004, 30 (8) :35~36.





