1 设计目标
中交上航局拥有百余艘各类工程船舶,其中大部分在中国境内各沿海城市码头、航道、近海区域施工.这些船舶大多安装了集成控制系统,在本船可实现对船舶各类疏浚机具的集中控制[1].
通过北斗卫星系统的短报文通信技术、移动通信网络的国际互联网接入技术,实现对各工程施工船舶实时或准实时施工信息的采集,并将这些数据传输到岸上服务器,实现数据的存储、分析、可视化再现,是工程船舶生产信息管理系统的设计目标.
根据这个目标,将系统划分为两个大的分系统,下设数个子系统:
1) 通信系统
包括移动通信网络、北斗通信系统、负载平衡系统、传输控制软件、压缩传输软件、控制系统接口软件、文件系统接口软件.
2) 生产信息管理应用程序
包括数据接入和数据库系统、应用系统门户网站、海况信息播报系统、潮位信息服务系统、施工船舶施工状态远程监视系统、船舶位置显示系统.
根据水上工程施工项目管理的特点和船岸通信的特点,本系统在设计时需考虑以下制约条件:
①结合移动通信网络和北斗卫星短报文通信两种通信技术,实现优势互补;②为适应多种疏浚船舶控制系统和多种通信网络的需要,船端数据采集和数据传输软件各自独立,通过标准接口交换数据;③信息数据集中存放在岸上服务系统,通过web 服务的方式发布,用户访问数据和界面只需通过浏览器登陆即可,无需安装客户端软件;④不同的用户设置不同的访问权限,便于实现子公司或项目一级的信息管理.
2 系统架构设计
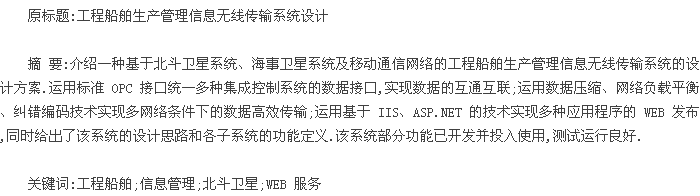
工程船舶信息管理系统由通信系统和应用程序组成.基本通信系统完成通信任务,包括传输控制、地址控制、压缩解压缩、分包与组装、负载平衡等功能.应用程序利用基础通信的数据实现数据的存储、远程访问、数据分析、可视化、功能界面等.
2.1 系统功能架构图
系统功能架构图反映了系统的功能划分和其层级关系,见图 1.
2.2 系统逻辑架构
系统逻辑架构反映了系统内部各分系统、子系统之间的层级关系、时序关系和依赖关系.
1) 控制系统接口和文件传输接口.分别接受控制系统计算和报表计算(自动或人工)的监控信息数据和各类文件,并向上层传输,或反之;
2) 压缩和解压缩软件.负责数据压缩解压缩,以提高信道利用率;
3) 传输控制软件.实现纠错协议、拆包和组装信息包;
4) 负载平衡软件.收到信息包后,根据当前网络状况选择通过何种网络传输信息包;
5) 信息传输链路.信息包经由海事卫星船舶地球站、移动终端或北斗船站通过无线信号传输到指定接收端;
6) 岸端拼装.接收到信息包后经相反的过程获取拼装后的、完整的信息或文件;
7) 数据持久化.信息被转发到标准 OPC 接口,并记录到实时数据库和历史数据库;文件被记录到历史数据库或文件系统;
8) WEB 发布.在实时数据库和历史数据库的基础上,通过 ASP.NET 技术、IIS 技术实现数据的 Web 发布和可视化.
3 通信系统
3.1 概要
因移动通信网络和海事卫星通信系统均基于TCP/IP 网络,且带宽较宽,属于正常通信范围,无需多讨论,下文主要论述北斗通信系统.
传统的移动网络系统基于 TCP/IP 网络服务,数据传送速率高,但覆盖范围一般不超过沿海 27n mile;北斗可覆盖全国,但数据传输速率较低;基于海事卫星地面站的网络覆盖范围和速率都能满足要求,但通信费用高昂.
本设计中包括通信传输控制和负载平衡软件,在不同的通信要求下选用不同的通信系统.
3.2 待传输信息的大小
船位信息,经度 40 bit,纬度 40 bit,艏向 8bit,船速 8 bit,合约 96 bit;时间信息,48 bit;绞吸单船数字量 1 300 个,合约 1 300 bit;绞吸单船模拟量 650 个,合约 650 × 12 bit = 7 800 bit;单点潮位数据,模拟量一个,合约 16 bit.
3.3 北斗通信系统通信特点
3.3.1 北斗短报文覆盖范围
东经 70°-140°,北纬 5°-55°,基本覆盖我国本土及外海全区域.
3.3.2 北斗短报文容量
北斗短报文通信,每次服务能完成 60 个汉字长度的电文通信,本信息系统需要传输的数据基本都超过 60 个汉字的长度,需要拆分成多个数据包发送.
3.3.3 北斗短报文传输质量
假设一条信息需要拆成 5 个包,以单包 99 %的成功率计算,信息的传输成功率是 95.1 %.单包 99 %的成功率是系统的固有性能,是无法突破的,需要在信息的重传和纠错上下功夫[2].
3.4 负载平衡
3.4.1 优先级定义
定义各类传输信号的优先级.在带宽受限的情况下,安全报警、紧急指令、关键机具状态参数等高优先级的信息将优先传输.
优先级定义由优先级定义配置工具和基于XML 的优先级定义文件组成,用户可以在获得权限的情况下自行定义各信号的优先级,具有通用灵活的特点.
3.4.2 网络调度和负载平衡
系统检测当前网络和网络通信健康状况,择优选择通信网络.优先使用移动网络,其次为北斗通信机,再次为船舶卫星站.
系统提供断点续传和缓存功能,由于带宽等原因阻塞的信息将在网络良好时通过特定的调度算法补发到岸上服务器.此时,实时信号具有较高优先级.
3.5 传输控制
传输控制软件主要针对北斗短报文通信系统,包括纠错协议设计和拆包与组装.
移动通信网络和海事卫星通信网络基于 TCP/IP 协议,是一种面向连接的,有纠错的协议,本文不再讨论.
北斗卫星系统通信链路层的传输控制由北斗通信机和卫星协同完成,这里不再讨论相关细节.
本节主要讨论如何控制北斗通信机,实现短报文通信的纠错和控制.
3.5.1 纠错协议
北斗通信受到通信频度的限制,采用请求重发的方式不能保证传输信号的实时性.本设计利用前向纠错方式:在发送的信息中加入校验码,在接收端根据校验码对原始信息进行查错和纠错.
纠错编码有许多种,具体使用哪种需根据实测结果分析比较后选择.
3.5.2 拆包与组装
由于北斗卫星通信系统的短报文通信有固定长度的限制(TCP/IP 网络也有报文长度的限制),所以有必要对较长的通信包进行拆分.拆分的原则是保持每个通信数据的独立性,即单个通信元数据不会被拆分到多个通信包中,这样有利于进行通信纠错[3].
拆包的方式有一个预先定义的偏移量表决定,这个偏移量表基于 XML 文件,系统提供适当的可视化工具编辑偏移量表.通过这种方式,可以大大降低系统的数据传输量:只需传输数据值而无需传输数据标签名.
一般情况下,数据包可以通过前向纠错功能恢复原始数据.如果发现错误且不能恢复则丢弃该数据包或请求重发.由于采用了预先定义的偏移量表,丢失的报数据不影响其他报数据的正常接收和复原[4].
3.6 压缩与解压缩
压缩率取决于文件的特性和使用的压缩算法.传输信息很短时,由于要添加相关的压缩编码字节,压缩效果为零,甚至要比原文件大;传输文件较大时,压缩效果较好,但不能出现丢包,否则整个文件传输失败.
本系统传输的文件都是普通的文本或二进制文件,压缩率为 85 %左右.针对模拟量和数字量信号,采用改进的旋转门压缩算法,该算法运用了信号随时间渐变的特性,压缩率可达 10 %,同时能保证信号再现精度.
但是,为了保证传输的有效进行,必须再添加控制字、包编号、校验码等辅助字节,预计 24bit/包[5].
3.7 控制系统接口软件
控制系统是指船上已安装的集成控制系统.由于历史、市场和技术的原因,中交上航局的疏浚船舶自动控制系统由多个供应商供应,这些系统没有规范统一的接口.本项目设计了控制系统接口软件,输入根据每条船的具体情况编写数据采集接口,输出采用统一规范的工业标准 OPC 接口,从而扫除接口障碍,真正做到数据互通互联.
控制系统接口软件具有以下功能:1) 定义信号表(基于 XML);2) 定义接口方式(OPC);3) 定义数据格式和精度.
3.8 文件系统接口软件
文件系统接口软件的功能有:1) 提供文件传输界面;2) 定义文件传输接口;3) 定义潮位数据等大文件数据分时、分割传输,远程查询传输的方法;4) 支持断点续传.
4 生产信息管理应用程序
4.1 数据接入
包括负载平衡软件、传输控制软件、压缩解压缩软件,基本功能和前节相同.
4.2 数据库
数据库包括历史数据库和实时数据库.实时数据库在内存中建立,具有更新快、查询效率高的特点,用于支持当前画面数据的更新.历史数据库在硬盘上建立,生产信息监控系统的历史数据库与传统的关系型数据库系统有很大不同,具有并发数高,数据量大的特点.除了支持普通关系型数据库的关系表功能外,还支持增量存储、数据压缩、高速随机访问、高并发数读写.
数据库系统的功能有:定义数据库、表;提供数据库访问接口;提供查询、排序、计算等数据访问服务.
4.3 应用系统门户网站.
应用系统门户网站是所有子系统的入口,基于 IIS、asp.net 技术,其功能定义为:提供各系统的统一入口页面;链接到各 web 应用软件;提供各用户单位登陆入口、权限管理、系统管理界面.
4.4 船位信息服务
基于 GIS 技术;显示船位、航向、艏向、航迹线;提供良好的交互界面.
4.5 船舶施工状态远程监视服务
4.5.1 耙吸挖泥船发布内容
1) 推进系统的主要相关数据,包括主机、泥泵和高压冲水泵等;2) 疏浚系统的主要相关数据,包括耙臂、产量、装舱和吃水装载等;3) 主要的施工界面,包括装舱曲线、耙臂姿态显示、文本显示等[6].
4.5.2 绞吸挖泥船发布内容
1) 推进系统的主要相关数据,包括主机、泥泵等;2) 疏浚系统的主要相关数据,包括泵机状态,转速负荷等、疏浚闸阀状态、绞刀状态、浓度流速信息等;3) 主要的施工界面,包括钢桩台车、液压系统、柴油机、封水系统等;4) 查看浓度流速等产量相关信息及抛锚杆、真空释放阀状态等.
4.5.3 抓斗船发布内容
船位;主要施工画面和信息,吊机倾角、回转角度、方向、斗位、开口度;主要产量数据,单位时间内挖掘次数等.
4.5.4 铺排船发布内容
船位、艏向;铺排施工画面,排位、出排速度等.
5 结语
现代工程船舶大多装有完备的施工监控系统,但这些监控系统相互独立、接口封闭,只能通过U 盘拷贝等传统手段进行数据交换,开发数据接口软件,运用工业标准的 OPC 接口可以实现数据的在线实时交换,同时便于对系统进行二次开发.
由于船舶一般处于近海施工,通信不便,形成了典型的信息孤岛,充分利用现有的移动通信、海事卫星通信和北斗短报文通信系统,可以实现优势互补,打造质优价廉的多网络通信系统,将各工程船舶的数据集中传输到岸上信息管理中心.
信息管理中心的各应用程序运用 WEB SERVICE技术,用户可以使用浏览器直接访问,无需安装各种应用程序客户端即可实现各种丰富的功能,既方便了用户的使用,也有利于开发和部署应用程序.该系统的部分功能已经开发完成并投入使用,测试运行良好.
参考文献:
[1] 戴文伯. 绞吸挖泥船自动控制系统实现[C]// 第十九届世界疏浚大会论文集. 北京:2010.DAI Wen -bo. Automatic control system implementation of cuttersuction dredger[C]// Proceedings of the 19th international dredgingconference. Beijing: 2010.
[2] 贾胜辉. 北斗卫星在气象数据传输方面的应用:经济发展方式转变与自主创新[C]// 第十二届中国科学技术协会年会论文集.福州:2010.JIA Sheng-hui. Application of Beidou Satellite Navigation Systemin meteorological data transmission: the transformation of economicdevelopment mode and independent innovation[C]// Proceedings ofthe 12th China Association for Science and Technology conference.Fuzhou: 2010.
[3] 成方林,张翼飞,刘佳佳. 基于"北斗"卫星导航系统的长报文通信协议[J]. 海洋技术,2008(1):26-28.CHENG Fang -lin, ZHANG Yi -fei, LIU Jia -jia. Long messagecommunication protocal based on the Beidou Satellite NavigationSystem[J]. Ocean Technology, 2008(1): 26-28.
[4] 邓玉芬,张博,沈明,等. 基于北斗卫星的海洋测量数据传输系统[J]. 海洋测绘,2009(4):67-69.DENG Yu-fen, ZHANG Bo, SHEN Ming, et al. Transfer system ofthe survey data based on the Beidou Satellite Navigation System[J].Hydrographic Surveying and Charting, 2009(4): 67-69.
[5] 胡光明,马民,苏冉冉,等. RDSS 短报文通信编码压缩技术研究[C]// 第二届中国卫星导航学术年会论文集. 上海:2011.HU Guang -ming, MA Min, SU Ran -ran, et al. Coding and com-pressing techniques of RDSS short -message communication [C]//Proceedings of the 2nd China satellite navigation conference.Shanghai: 2011.
[6] Q/ZJGF SJ 001-2009,耙吸挖泥船疏浚监控系统技术标准[S].Q/ZJGF SJ 001-2009, Technical standard for dredging supervi-sory and control system of trailing suction hopper dredger[S].





