1 引 言
随着人类科技的发展及技术需求的增加,目前对于空间望远镜要求具有越来越大的口径和越来越高的稳像精度。尤其是天文观测领域,由于对宇宙诞生及演化、黑洞和暗物质等前沿领域的迫切探索需求,目前国际上的高水平空间相机一般要求毫角秒级别的稳像精度,如 Hubble天文望远镜要求达到0. 007″的稳像精度。高精度稳像控制系统直接决定着空间望远镜的成像质量,是一项需要充分重视和深入研究的关键技术。
空间大口径天文望远镜实现毫角秒级别的稳像精度是非常困难的。多种复杂的影响因素均会对稳像精度造成影响。如搭载于飞行器之上的空间望远镜会受到飞行器轨道运动和姿态变化的影响,望远镜内外部的振动条件也会影响指向精度;直接暴露于外空间环境的望远镜还会受到宇宙中多种扰动力矩的影响( 如近地轨道中的太阳辐射光压、重力梯度、气动和地磁等力矩) 。这些影响因素中,尤其以振动为主,由于空间望远镜及载体振源复杂且分布于较宽频带,为实现高精度稳像,需要控制系统具有足够的带宽。然而一般情况下,空间大口径望远镜由于具有较大的体积、质量和柔性附件( 如太阳帆板) 等原因,普遍结构基频较低,结构基频会严重限制控制系统带宽的增大。此外,各种传感器噪声以及执行器的非线性影响也需要在稳像控制系统的设计过程中得到充分重视。
为此,空间大口径望远镜的稳像控制是一个复杂的系统工程,需要充分考虑各种扰动源,采取隔振措施抑制振动,合理设计望远镜的结构特性,考虑多级控制系统级联的设计方案。
目前,国内地基大口径望远镜的稳像控制已经比较成熟。为提高控制精度,普遍采用多级复合轴控制系统,一些抗扰能力较强的控制算法如滑模变结构、自抗扰、内模等方法也得到了工程实现,但是国内尚无在轨运行的空间大口径望远镜。鉴于空间大口径望远镜稳像控制系统的重要性以及难度,本文对目前国际上自由飞行和载体搭载两种模式空间相机的具有代表性的稳像系统的发展情况进行了综述,重点介绍了其设计思想和设计方案,在此基础之上,总结了目前先进稳像系统的发展趋势。为我国今后的空间大口径望远镜高精度稳像系统的发展提供了设计参考和依据。
2 自由飞行模式
2. 1 Hubble 天文望远镜
采用自由飞行模式的空间望远镜一般采取飞行器和望远镜一体化设计,飞行器为望远镜的稳像控制服务,一般采用反作用轮、控制力矩陀螺( GMC) 等作为执行器,采用星敏感器、陀螺等惯性传感器和精密导星仪等图像传感器作为测角传感器。Hubble 天文望远镜( 如图 1 所示) 是其中的一个典型代表。Hubble 要求达 到 0. 007″ 的指向稳定度和90° /18 min 的姿态机动能力。Hubble 的控制系统( 如图 2 所示) 主要采用被动隔振和姿态控制相结合的方法实现精密稳像。采用速率陀螺与星敏感器组合实现粗惯性测量,速率陀螺与精密导星传感器( 测量精度为 0. 003″) 组合实现精惯性测量,由反作用轮提供姿控力矩。为满足高精度指向需求,考虑了太阳帆板柔性的影响,合理设计了结构动力学参数与控制系统参数,保证充分的幅值和相位裕度; 每个反作用轮加装三对流体阻尼隔振器隔离振动。由于当时技术条件限制,其精密导星传感器非常复杂( 如图 3 所示) ,主要由 Pickoff 反射镜、非球面校准镜、星选择器 A 和星选择器 B( 各由一个伺服系统驱动) ,折转镜、滤光轮、分光镜、两个 Koesters 棱镜( 沿 X、Y 轴垂直放置) 和 4 个光电倍增管等组成。两个 Koesters 棱镜,4 个光电倍增管以及折转镜组成了一个两维干涉仪,这样,可以分别测量两个轴的角位移信息。
2. 2 JWST
James Webb Space Telescope ( JWST) 与其之前的概念设计下一代空间望远镜( Next GenerationSpace Telescope,NGST) ( 如图 4 所示) 采用了被动隔振和粗、精两级复合轴稳像系统方案。
稳像系统以 NGST 为例,如图 5 所示: 粗级系统为位于卫星基座处的惯性姿控系统 ACS,包括星敏感器、陀螺组成的惯导系统和反作用轮; 精级稳像系统为快摆镜 FSM,包括微角度调整机构和精密导星测量系统。ACS 控制带宽设计为0. 025 Hz,远低于结构模态频率; FSM 带宽为6 Hz,采用旋转平衡机构,避免在带宽内激发柔性模态。此外,在反作用轮上加装 1 Hz 隔振器。系统实现了 0. 004 8″的稳像指标要求。
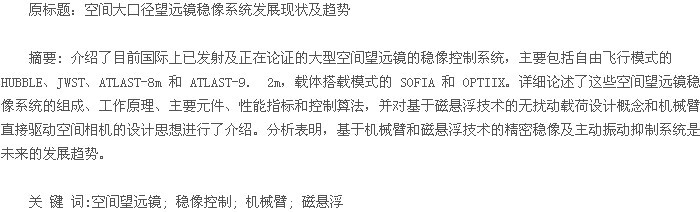
JWST 的精密导星测量系统位于焦面的两块边缘视场,每块区域占 2. 3' ×2. 3'的视场,覆盖有 2k × 2k 的 HgCdTe 探测器。导星测量系统的指标参数如表 1 所示。导星传感器的工作模式主要有识别过程、捕获过程和精密导星过程。它是利用电子学的方法搜索捕获导星,相比于 HST的导星测量系统,速度要快很多。在 NASA 公开的文献中,未介绍实现如此高精度测量的亚像元细分定位技术的细节,需要进一步深入研究。JWST 的快反镜是空间望远镜中的一个典型例子。【表1】
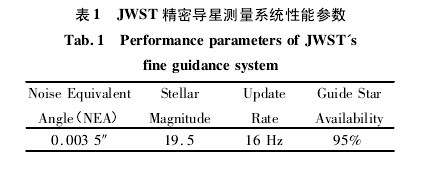
如图 6 所示,快反镜由镜体结构( 包括平面镜及镜架) 、柔性支撑、差分阻抗传感器( 测量微小位移) 和音圈电机组成。每一对音圈电机通过推拉方式驱动将平移运动转化为镜体的小角度转动。主要性能指标如表 2 所示。【表2】
2. 3 ATLAST-8M
ATLAST( The Advanced Technology Large-Ap-erture Space Telescope) 是 NASA 规划的继 JWST相机之后的大口径天文望远镜。其中8 m 口径方案的相机( 如图 7 所示) 预计在 2020 年代发射于 L2 点。ATLAST-8m 的稳像控制系统也是一个典型的复合轴系统。其中粗级为姿态控制系统,由刚性固联在相机上的惯导系统( 包括加速度计、陀螺和宽视场星敏感器) 测量相机质心的位置和姿态,采用基于动力学模型的反馈线性化算法、现代滤波和标定算法,由控制力矩陀螺实现相机 2″的姿态控制精度。精级系统为超精密稳像系统( 如图 8 所示) ,主要包括精密偏移图像运动传感器、快反镜( 由压电陶瓷驱动) 和活动次镜( 作为光学补偿器,采用电磁微驱动方式) ,通过数字 PID 算法实现 0. 001 51″的高精度稳像控制指标。
为实现高精度稳像,ATLAST-8m 对 GMC 的振动采用了特殊处理,通过对每一个力矩陀螺的转子进行 5 自由度气浮,以及将力矩陀螺经由振动吸收框架安装于相机本体之上,使得传递至相机的振动幅值降低至 0. 000 2″。
2. 4 无扰动载荷概念
上述空间相机一般采用粗精复合控制 + 被动隔振手段实现精密指向控制和振动抑制,在设计过程中需要充分考虑系统结构模态、传感器噪声及各种振动的影响,综合设计控制器带宽和结构动力学特性参数,并进行多次迭代优化,方能满足设计指标要求,且对结构设计和扰动源要求极高。并且由于被动隔振器隔振性能有限,对低频振动无能为力,甚至会有所放大。针对以上问题,美国 Lockheed Martin 公司的 Nelson Pedreiro提出了基于磁悬浮技术的“无扰动载荷”( Dis-turbance-Free Payload,DFP) 设计概念。
如图 9 所示,整个系统包括载荷模块( 如空间相机) 和平台模块( 如卫星平台) 。载荷与平台之间通过非接触调节器( 如磁悬浮调节器) 相连,数据和电源信号通过无线方式传输,消除了载荷与平台之间的物理接触。以安装于载荷之上的姿态传感器( 如星敏感器、陀螺或精密导星传感器)敏感载荷惯性姿态,控制非接触调节器带动载荷运动,从而实现载荷姿态和位置控制; 以安装于载荷和平台之间的位置传感器敏感载荷和平台之间的相对姿态和位置,控制平台调节器( 如反作用轮和推进器) 带动平台运动,使得载荷和平台之间的磁悬浮调节器不至于超出行程范围,保持载荷和平台之间的无物理接触状态。
由于磁悬浮调节器电流环带宽非常高,平台的振动引起的反电势几乎可以被完全抑制,因此平台振动不会通过调节器传递至载荷。载荷运动对平台产生的反作用力和力矩可以通过动力学计算得到,并传递至相对姿态和位置控制器进行实时补偿,从而实现高精度主动振动抑制和精密指向。六自由度 DFP 多设计为悬浮 Stewart 平台形式。
在地面气浮平台试验中,该方法实现了全频段-51 dB( 1/355) 的主动隔振效果( 如图 10 所示) 。将该方法应用于 NGST 相机的稳像控制( 无快反镜参与精级稳像的前提下) ,仿真分析结果表明 X 和 Y 方向稳像精度分别为 0. 003 2″和0. 003 4″( RMS) 。该方案也应用于 TPF( Terrestri-al Planet Finder) Coronagraph( 图 11) 和 Laser-com( Laser communications)( 图 12) 的概念性设计之中。采用该技术,即在相机和卫星平台之间增加一级 DIPPS( Disturbance Isolation and precision Point-ing System) 与 DFP 功能作用相同,在无快摆镜参与的情况下,实现0. 001 3″的稳像控制精度。
3 载体搭载模式
3. 1 SOFIA 相机
采用载体搭载模式的空间相机一般载体( 如卫星、飞船和空间站等) 不完成粗指向控制,需要空间相机自身的控制系统实现粗指向和精密稳像。对于小型相机,采用地面系统常用的跟踪架方式是一种较好的成熟选择。然而对于未来大口径、展开式、拼接主镜甚至于在轨组装需求趋势,超大体积及质量的跟踪架对于空间应用显然是难以接受的,需要进行特殊的结构形式设计。
如图 14 所示,Stratospheric Observatory for In-frared Astronomy( SOFIA)安装于波音 747 之内。采用 3 维球形力矩电机驱动,减小了质量和体积。SOFIA 的稳像精度指标为 0. 2″。与其他空间相机有所区别的是 SOFIA 除受到飞机平台振动影响之外,由于舱口开放受气动影响较大,SOFIA采用被动空气弹簧系统( 振动隔离系统 VIS) 隔离部分飞机振动。SOFIA 的稳像控制系统如图 15所示。主要包括刚体姿态控制器( 精密驱动控制器 FD) 和相机柔性形变前馈补偿器( FBC) 。刚体姿态控制器包括三个单输入单输出控制器,分别对应于相机的三轴,在控制器设计中,忽略了三轴之间的运动耦合,采用经典控制理论设计控制算法。相机的角速度由光纤陀螺测量得到,转速信息反馈至内环转速环,陀螺积分得到的角度信息反馈至外环位置环。位置环设计为 PD 控制器,转速环为 PI 控制器并设计增加滤波器( 零极点对、陷波滤波器和低通滤波器) 以补偿结构柔性模态影响。控制器带宽为 5 ~8 Hz。如果焦平面的图像对外部扰动的响应特性能够完全确知,则大部分的图像运动能够由 FBC 进行补偿。如飞机的平移加速度由安装于相机之上的加速度计观测得到,如果由惯性加速度至图像运动的传递函数可以精确得到,则通过设计前馈滤波器补偿飞机振动带来的影响。同样气动的影响可以由陀螺测量得到并采用同样方法补偿。
FD 的力矩电机和快反镜均可用于完成柔性补偿,快反镜具有补偿 FD 带宽之外( 30Hz) 扰动的能力。
由于放置于舱内,开口有限导致视场受限,SOFIA 的设计思想并不太适用于大多数的空间相机。
3. 2 OPTIIX
目前,机械臂技术已经广泛应用于空间领域,如航天飞机上的加拿大臂 1 号与国际空间站上的加拿大臂 2 号( 如图 16 所示) 。机械臂与跟踪架相比有体积小、质量轻、可折叠等优点,能够减小发射质量和安装空间。从以上几点考虑,采用机械臂驱动空间相机无疑是一种较好的选择。如图 17 所示,预计于 2015 年安装于国际空间站,为未来在轨组装相机做前期试验准备的1. 5 m 口径拼接主镜空间相机 OPTIIX( the OpticalTestbed and Integration on ISS Experiment),就采用了机械臂驱动的方式。
OPTIIX 的机械臂继承了国际空间站 Robo-naut 2 ( R2,如图 18 所示)拟人机器人的手臂技术,机械臂的每个关节采用无刷力矩电机、电磁失电制动器和谐波齿轮减速器。
OPTIIX 的整体稳像系统分为三级。粗级机械臂系统利用星敏感器和陀螺反馈信息提供俯仰、偏航和横滚 3 个自由度的粗指向; 粗快反镜为第二级稳像系统,利用陀螺前馈数据完成控制; 三镜为精级稳像系统,通过精密导星相机实现稳像。
然而,机械臂驱动空间相机完成指向控制也具有一些固有的弱点,如多关节构型导致非线性动力学耦合非常严重,采用减速机构存在关节柔性,驱动大惯量负载使得结构基频严重降低,悬臂结构还会导致对载体的平移振动非常敏感。
这些因素均会对指向控制精度造成影响。此外,多自由度机械臂系统的地面重力卸载试验也是非常复杂的。
如果采用两级复合轴控制系统,即粗级机械臂和精级快摆镜的方式,可能会由于机械臂指向精度较低而要求快摆镜的行程很大,快摆镜行程过大可能会导致成像质量的严重下降。OPTIIX的三级控制方案能够较好的解决上述矛盾,但是对光学设计的要求较高,需要实现多块反射镜的在轨可调能力。
3. 3 ASPS
如图 19 所示,Annual Suspension and PointingSystem( ASPS) 是美国为大规模空间载荷的高精密指向控制设计的一种通用平台。主要由关节系统( 俯仰、横滚和偏航) 和隔离系统( 如图 20所示) 。关节系统采用力矩电机直驱方式实现俯仰、横滚和偏航方向的粗指向; 隔离系统通过 6 个磁轴承调节器完成六自由度磁悬浮隔振系统组成。在承载 7 500 kg 负载( 长 7. 3 m,直径 3. 8 m圆柱形) 和存在载体各种扰动的情况下,实现了0. 03″的指向精度。
该方法结合了机械臂关节和磁悬浮技术,具有较好的应用前景。但是其磁悬浮系统六自由度结构设计比较复杂,三自由度转动和三自由度平移运动耦合也比较严重。由于设计完成于 20 世纪 80 年代,从目前的技术水平来看,整体的结构及控制有进一步优化设计的可能性。
4 结束语
由上述空间光学望远镜稳像系统的发展现状来看,目前高精度稳像指标一般要求达到毫角秒级别,未来会有更加苛刻的要求,伴随着技术指标的不断提高,在传统控制系统设计方法的基础之上需要一些新的研究方法和思路。目前常用的稳像系统一般采用多级复合轴控制方法,采用高精密导星系统作为稳像控制系统的传感器,并需要对影响稳像精度的各种扰动源尤其是振动采取特殊处理方法。由于机械臂具有的体积小、质量轻等结构上的特点,未来将会有越来越多的空间望远镜采用机械臂驱动的方法。与传统主动和被动隔振系统相比,磁悬浮技术具有更加优异振动隔离效果,将机械臂与磁悬浮技术相结合实现高精度稳像控制和主动振动抑制也将会是未来的一种发展趋势。





